4. 立骨重心制御と骨傾斜容認,重心乖離容認(つづき)
骨と関節の状態の推定(つづき)
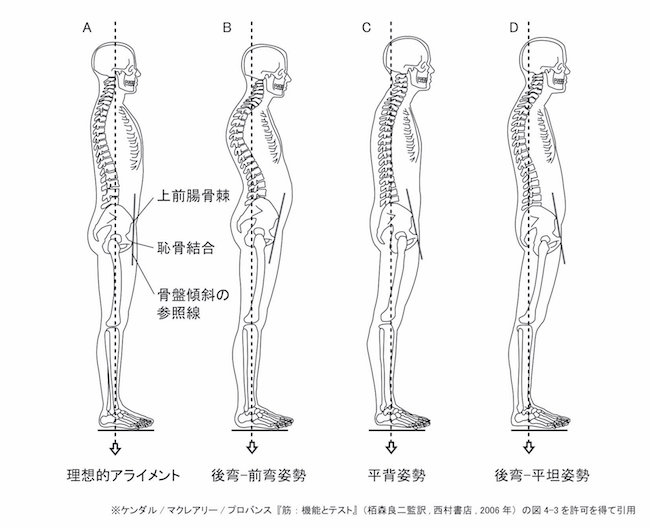
図1−3 姿勢の4つのタイプ
脊柱最上部の環椎の上に頭蓋骨があり,それらは環椎後頭関節で関節する。環椎後頭関節には関節面が左右二対あり,ここで頭蓋骨からの荷重を環椎が受けることになる。環椎後頭関節は,頭蓋骨が突隆し,環椎が陥凹する形で前後で楕円形をなしている。この構造から,頭蓋骨は最大面積荷重の関係で多少動くことができると考えられる。しかし,双方の関節面の面積はほぼ同じであり,股関節や足関節ほどの可動域はなく,最大面積荷重の関係となる範囲は狭い。最大面積荷重の関係であれば,環椎の上で,頭蓋骨が大きく傾かずに乗る状態となっているだろう。このことから,Aではその関係が最大面積荷重の関係であることが推定できる。B,C,Dについても頭蓋骨が極端に傾いているわけではなく,最大面積荷重の関係であることが推定できる。
Aでは体全体の重心が適切位置に位置づけられている中で,体を支える骨の全てが最大面積荷重の立骨状態であることが推定できる。このAの図から,体を支える骨が下に隣接する骨の関節面にべったりと荷重していて,それぞれの骨が「立つ」と喩えられるような状態となっていることがイメージできる。また,足底の上の空間に体が偏りなく配置されて,足底全体でべったりと荷重していて,安定して体位が維持されている状態がイメージできる。
ここで推定してきたように,一般的に理想的とされる姿勢アライメントは立骨重心制御の状態となっている可能性は高いと考えている。つまり,一般的に理想的とされる姿勢アライメントであることは,立骨重心制御状態の必要条件を満たす可能性は高いということである。
そして,この逆の命題となる十分条件についても成り立つ可能性は高いと考えている。つまり,立骨重心制御状態は,一般的に理想的とされる姿勢アライメントとなるという命題である。
足関節や股関節などいくつかの関節では,複数の状態において最大面積荷重の関係となり得ることを述べた。これは立骨重心制御によって,立位姿勢がある一つの状態に特定されるわけではなく,それが複数の状態を許容することを示している。複数の状態が許容されるのであれば,前述した命題は成り立たない。
しかし,この許容される複数の状態とは,足関節と股関節を曲げた中腰の立位などの状態であり,直立立位姿勢以外の姿勢アライメントとなるものである。直立立位姿勢において,立骨重心制御状態は,ある一つの状態に収斂し特定されることになる。それが一般的に理想的とされる姿勢アライメントとなると考えている。このため,立骨重心制御状態は,一般的に理想的とされる姿勢アライメントとなると推定することができ,十分条件についても成り立つ可能性は高いと考えている。
なお,立骨重心制御が複数の状態を許容するものであることは,中腰位や座位といった直立立位以外の姿勢や体位においても,立骨重心制御の考え方で理想的な姿勢アライメントを提示できることを示しているともいえる。
このようなことから,直立立位姿勢においては,立骨重心制御状態と一般的に理想的な姿勢アライメントは必要十分条件を満たすことが推定でき,私達が立骨重心制御状態を実現することで,その姿勢は一般的に理想的な姿勢アライメントとなる蓋然性は高いといえる。
(第1章その12につづく)
コメント