既に述べたように,私は,一定の割合の人が骨傾斜容認と重心乖離容認であり,その状態に陥りやすいと考えている。
骨傾斜容認状態では,腰椎や胸椎の屈曲や伸展,頭部前方突出と頸椎伸展,骨盤スライド後傾という傾向がみられる。また,重心乖離容認状態では,適切位置よりも後方に重心が乖離する傾向がみられる。一定の割合の人が,図1−3のB,C,D,図1—5のB’,D’のような姿勢になっていることは,私だけが知ることではないだろう。多くの人が,周囲の人を見たり,自身の姿勢を省みたりする中で,わかることである。
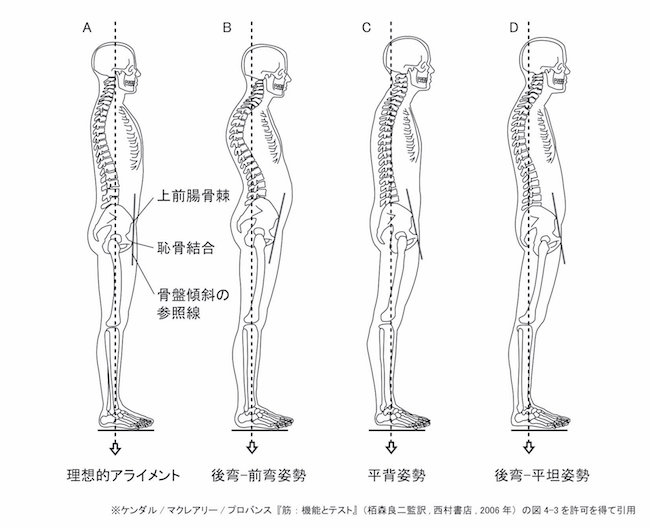
(再掲)図1−3 姿勢の4つのタイプ
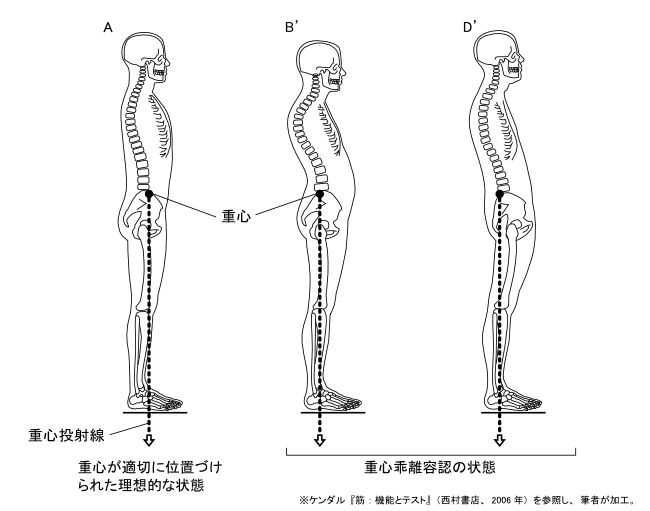
(再掲)図1−5 重心乖離容認の状態例
私達が,骨を立てて,重心を乖離させずにいることは可能なことである。一定の割合の人は,その可能なことを実現せずに,骨傾斜を容認し,重心の乖離を容認しているために,体へ余計な負担を加えていて,呼吸,発声などの機能を制約している。この体位維持の仕方は筋や靭帯といった張力に依存した事後的な対応であり,張力事後対応と呼ぶが,一定の割合の人がこの張力事後対応という不利な体位維持の仕方をしてしまっている。
なぜ,不利な骨傾斜容認状態や重心乖離容認状態に一定の割合の人が陥ってしまいやすいのかについて,考えられる理由を二つ挙げる。
一つは,実行者は,骨傾斜を容認して関節を曲げた状態にしたり,重心乖離を容認して体に倒れる力を加えることにより,自身の支え方を「楽」と感じるからではないかと考えている。
実行者は,体を支える骨を骨傾斜させて骨に倒れる力を加えることで,本来働くべき脊柱起立筋などをそれほど働かせずともよい状態にできる。また,靭帯の張力や骨性の支え[20]を動員できることから,筋負担もそれほど大きくせずに,体位維持を達成できることになる。一定の割合の人は,この状態を「楽」と感じてもおかしくはない。
実行者が立位時に骨傾斜容認状態でいた場合で,このことを具体的に示す。この場合は,骨盤スライド後傾が起こっていやすい。骨盤スライド後傾があれば,上半身が後方に傾くこととなり,上半身に後方に倒れる力が生じる。このため,体の前側の筋である腸腰筋,大腿四頭筋,腹筋群が体位維持のために動員され,その主動的な役割を担うようになる。この結果,本来働くべき脊柱起立筋や殿筋,大腿二頭筋は上半身支持の主動的な役割から解放され,場合によっては弛緩することが可能な状態となる。
また,骨盤スライド後傾は,股関節伸展を伴っている。股関節伸展が進めば,強力な大腿腸骨靭帯の伸張による関節固定の力が動員されることになる。仙腸関節や仙骨と腰椎の関節における靭帯も関節固定の力として動員される。腰椎も伸展していれば,腰椎部の靭帯張力や骨性の支えによる関節固定の力も動員される。
実行者は,このように骨傾斜を容認することで,こうした靭帯張力や骨性の支えを関節固定力として動員できるために,前側で体位維持の主動的な役割を担うことになった腸腰筋や大腿四頭筋,腹筋群の負担をその分軽減させることができる。実行者が体位維持に筋の筋緊張を用いれば,実行者はそれを負担として感じる。しかし,靭帯張力や骨性の支えを用いても,実行者はそれを負担として感じない。筋緊張の継続は実行者に疲労感をもたらすが,靭帯緊張の継続は実行者に疲労感をもたらさないからである。
また,実行者が重心乖離容認状態でいた場合を考える。この場合は,体の重心が適切位置から後方に乖離することになる。この場合も骨傾斜容認状態と同じように,体の前側の筋群が体の後方に倒れる力を支えて,体位維持の主導的な役割を担うようになり,逆に本来働くべき脊柱起立筋などはある程度弛緩できるようになる。
実行者は,このように骨を傾斜させて重心を後方に乖離させることで,本来働くべき脊柱起立筋などを働かせずともよく,かつ靭帯張力や椎骨の骨性の支えで固定された骨格によりかかれるようになり,筋負担を軽減させて体位を維持できることになる。実行者が「疲れ」として感じるのは筋負担であるため,こうした処置は実行者が感じる負担を軽減するものといえ,実行者が「楽」と感じるものといえるだろう。
このように,骨傾斜容認や重心乖離容認時における張力事後対応は,実行者にとって楽と感じるものとなるため,一定の割合の人は骨傾斜容認状態や重心乖離容認状態に陥ってしまいやすいと考えられる。
こうした体位維持の仕方に陥りやすいもう一つの理由としては,骨傾斜容認や重心乖離容認の時の張力事後対応は,実行者の注意を要しない単純な体位維持の仕方となるからというものである。
実行者が立骨重心制御することとは,骨を立てて,重心を適切位置に位置づけることである。これは,体全体と体を支える骨を,最大面積荷重の関係となる特定の均衡状態にあり続けさせる制御となる。この場合の均衡状態とは,体や骨が様々な方向に倒れる可能性がある均衡状態のことである。一定の静止時においても,体や骨には様々な方向に倒れる力が生じる。このため,実行者はこうした様々な方向に倒れる力に対処する必要がある。その場合の対処の仕方は,体や骨が倒れた方向次第で動員する筋を変えるようなものとなり,臨機応変な対処の仕方となる。この対処の仕方は,対処の幅広さゆえに,実行者の一定の注意を要するものといえるだろう。
一方で,骨傾斜容認状態や重心乖離容認状態というのは,体全体や体を支える骨が既にある方向に倒れている状態であり,これらの倒れる方向が限定されている均衡状態であるともいえる。実行者は,限定されている倒れる力に対応していればよいため,限定した筋を用いていればよい。張力事後対応の対処の仕方は,このように対処の仕方が限定されたものであり,それほど実行者の注意を要しないものといえよう。単純化した対処の仕方ともいえる。
重心乖離容認状態では,立位の際に後方に重心が乖離している。この場合は,体の倒れる方向は主に後方となり,前方には体は倒れにくい。体の倒れるリスクを後方だけに限定しているともいえ,実行者の対応策としても前側の筋群の働きや靭帯張力で体の後方に倒れる力のモーメントを支えるだけという単純なものとなる。一方で,立骨重心制御状態では,体の前後の重量バランスが均等な状態で体が均衡しており,前にも後ろにも体が倒れるリスクがある。実行者の対処の仕方としては,体の倒れる方向次第で用いる筋を変えていくものとなる。対処の仕方が増えることになるといえる。
体位維持の仕方が単純な対処の仕方でよければ,実行者は体位維持に注意を向ける必要が少なくなり,他の行為により注意を向けられるようになる。実行者が注意を他へ向けようとすれば,体位維持活動の有利さよりもその対処の単純さを優先して,骨傾斜容認や重心乖離容認という態度でいて張力事後対応をしていやすいといえるだろう。そして,多くの人は体位維持のことには注意を向けずに,自身の行う活動に注意を向けているだろう。このため,一定の割合の人は,結果的に不利な体位維持の仕方である骨傾斜容認状態や重心乖離容認状態に陥ってしまうと考えている。
このように,実行者が張力事後対応をしているのは,体位維持活動の有利さよりもその対処の単純さを優先しているからともいえる。このことから,張力事後対応は,実行者の即席な対処とも呼べるものといえる。一定の割合の人がこの即席な対処で体位維持を達成していく傾向については,動作時についてもあてはまる。第4章で,動作時の対処もふまえた上でこの即席な対処の仕方について改めて説明する。
このように,骨傾斜容認状態や重心乖離容認状態でいて張力事後対応をしていることを,実行者は楽に感じやすく,張力事後対応が単純な対応策で実行者の注意を要しないものとなることから,一定の割合の人が静止時の際にこうした不利な体位維持の仕方に陥りやすいと考えられる。
(第1章終わり。第2章につづく)
脚注
[20] 隣接する骨が接する形で関節の動きを抑制すること。関節の可動域限界を作る一つの要素。
コメント