4. 立骨重心制御と骨傾斜容認,重心乖離容認(つづき)
理想的な姿勢アライメントでは骨を通じた力で偶力が生じにくい
立骨重心制御状態が理想的な姿勢アライメントとなることを述べた。直立立位姿勢が理想的な姿勢アライメントとなっていれば,その状態は,骨を通じた荷重と反力によって回転させる力である偶力が骨に生じにくい状態となる。このため,直立立位の立骨重心制御状態も,この偶力が骨に生じにくい状態であるといえる。
骨を通じた荷重と反力によって骨に生じる偶力とは,「ある体を支える骨において,上に隣接する骨からの荷重の力の向き(ベクトル)と下に隣接する骨からの反力の向き(ベクトル)にずれがあることで,その体を支える骨に生じる偶力のこと」である。姿勢の状態がこの偶力が生じにくい状態であれば,その状態で体を支えるために必要な張力は軽減されることから,実行者の張力負担が軽減される。また,この状態は体を支える骨が動きにくい状態でもある。これらの特徴は立骨状態で得られる利点となるが,これらの利点は立骨重心制御状態で維持されることになる。
これを逆にいえば,骨傾斜容認状態の場合は,その姿勢が理想的なアライメントとならず,体を支える骨に偶力が生じやすくなる,ということである。このため,局所的な筋や靭帯の負担が大きくなり,かつ体を支える骨が動きやすい状態となる。
ここでは,骨傾斜容認状態では,骨傾斜のみられる寛骨で上の骨からの荷重と下の骨からの反力によって偶力が生じやすいこと,一方の立骨重心制御状態ではそれが生じにくいことを述べる。図1−3のケンダルの図を用いて,立骨重心制御状態(A)と骨盤スライド後傾を起こしている骨傾斜容認状態(C,D)を対比しながら以下に説明する。
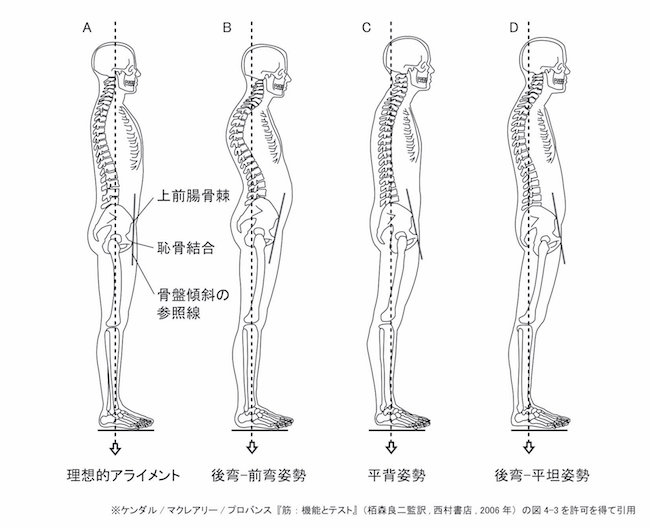
(再掲)図1−3 姿勢の4つのタイプ
CとDでは,寛骨が後方に傾斜している。これは骨盤スライド後傾と私が呼ぶ骨傾斜である。この状態では,仙腸関節で仙骨から受ける荷重の向きと,股関節で大腿骨頭から受ける反力の向きにずれが生まれ,寛骨に偶力が生じることになる。図1−8Cに寛骨における力の関係を示している。
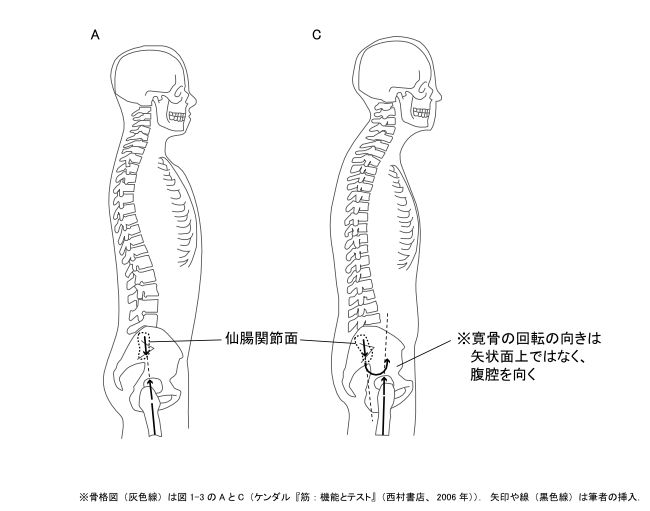
図1−8 骨盤の寛骨で生じる偶力
寛骨が仙腸関節面で受ける荷重の力と,股関節で受ける反力の向きは,3次元空間では元々大きくずれている。仙腸関節は水平ではなく垂直に近い関節で,寛骨が仙腸関節から受ける荷重の力の向きは,図上では手前を向き,やや背側を向く(左側を向く)形で働いている。一方で,寛骨が寛骨臼で大腿骨頭から受ける反力は腹腔の方を向いている。このように,この二つの力のベクトルは空間上でずれがある。
しかし,この元々の空間上のずれは,骨盤の構造的特徴から即座に偶力を生むわけではない。この骨盤部についても,他の関節と同様に矢状面での力の向きの関係をみていくことで,偶力が生じているか否かがわかると考えている。具体的にいえば,矢状面上で大腿骨頭からの反力が仙腸関節面の方を適度に向いていれば,寛骨に偶力は生じなくなり,反力の向きが仙腸関節面から乖離するほど偶力が生じることになりやすい,といえると考えている。
寛骨は左右に対として存在し,左右の寛骨は下部の恥骨結合で結合されている。左右の寛骨は,仙腸関節面で仙骨を挟む形で仙骨を支えている。これは,トングのような仕組みといえる。トングの支点が恥骨結合であり,柄が寛骨で,挟むところが仙腸関節面となる。左右の大腿骨頭からの反力が挟む力となって仙骨を支えている。このように仙骨を挟む形で支える骨盤部の特徴から,矢状面において,大腿骨頭からの反力が適度に荷重のかかる仙腸関節面を向いていれば,寛骨に偶力は生じにくくなり,その反力の向きが仙腸関節面の方から乖離すれば偶力が生じやすくなる,ということがいえる。
この観点で図をみると,Aでは矢状面上で,挟む力である大腿骨頭からの反力の向きがある程度仙腸関節面を向いていることから,寛骨に偶力は生じにくい状態であることが推定できる。一方でCとDでは,寛骨が後傾しており,挟む力である大腿骨頭からの反力の向きが上前腸骨棘の方(腹腔の方)を向いている。挟む力の向きが,挟む部位である仙腸関節面から矢状面上で大きくずれていることから,寛骨に上前腸骨棘の方(腹腔の方)へ偶力が生じていることが推定できる。
この場合は,仙腸関節背側の靭帯,恥骨結合の靭帯(上恥骨靭帯と恥骨弓靭帯)が伸張の力を受けることになる。偶力による力のモーメントは,これらのほとんど動かない関節における強力な靭帯の働きによってすぐに支えられるため,寛骨における腹腔方向への回転の動きは起こらない。しかし,靭帯への負担は生じる。そして,この靭帯張力の拮抗によって,力のモーメントは,矢状面上の力のモーメントに変換されることになる。この力のモーメントは,骨盤下部を前方に移動させ,股関節伸展位で骨盤より上の胴体部を後方に倒す力となる。このため,これらを支えるために,股関節の腸骨大腿靭帯の張力が動員されやすく,また,それを補う形で腸腰筋や大腿四頭筋,大腿二頭筋などの筋群が働くことになる。胴体に後方に倒れる力が生じることから,腹筋群も動員されやすい。寛骨と腰椎下部椎骨をつなぐ腸腰靭帯も伸張して,腰椎の後方への傾倒を支えるための張力を発揮しやすいだろう。この際に,腰椎屈曲の動きが加わっていれば,それによっても腸腰靭帯は伸張するため,両方向から伸張する力が生じて,腸腰靭帯の負担は大きくなるだろう。
このように骨傾斜容認状態のCとDでは,骨盤の寛骨で上の骨からの荷重と下の骨からの反力によって偶力が生じていて,この偶力で骨が回転しないように筋や靭帯の張力が支えている状態となる。このため,局所的な筋や靭帯といった組織の負担が増えることになる。また,骨盤は支えられているものの,その支えは張力により多く依存した状態であるため,回転しやすくなっている。
Aでは,立骨重心制御によって姿勢が理想的な姿勢アライメントとなり,上の骨からの荷重の向きと下の骨からの反力の向きにずれがなく,骨盤の寛骨をはじめ体を支える骨には偶力が生じていない。このため,体を支える骨は動きにくい状態となっており,局所的な筋や靭帯といった組織の負担は軽減されることになる。
ここで述べたことは,立骨重心制御状態では,「局所的な筋や靭帯といった組織の負担が軽減し,骨が動きにくい」という立骨状態における利点が減損しないことを示している。そして,このことは「私達ヒトは,体の重心が適切に制御されて,全ての体を支える骨が立骨状態となったときに,その利点が減損しないような骨の構造を持っている」ということを示している。
立骨状態であれば,骨が回転しにくく動きにくい状態となることは,モデルを用いて前述した。骨が動きにくい関係で全ての骨を関節させれば,その骨が動きにくい状態となるのは当然と思われるかもしれない。しかし,立骨状態の特徴は,最大面積荷重の関係によって「上の骨や下の骨に対して回転しにくい」ことである。それは,上の骨からの荷重と下の骨からの反力によって中間の骨に偶力が生じないように制限するものではない。最大面積荷重によって回転しにくい環境があっても,上の骨からの荷重と下の骨からの反力によって中間の骨に偶力が生じる場合はある。それは骨の形次第となる。
最大面積荷重の特徴を説明するために,三つの骨が縦に連なる図1−1のモデルを用いた。同じような三つの骨でもBが図1−9のような形をしていたとすれば,骨の関係が最大面積荷重の関係であったとしても,Bに回転の力である偶力が生じることになる。しかし,実際の体にはこのような骨はないといえることが先に述べたことである。
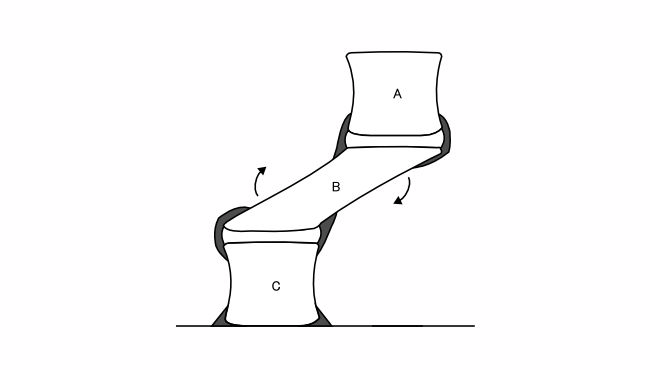
図1−9 偶力が生じる骨の形
私が述べていることは,ヒトは,重心を適切に位置づけて,体を支える骨の全てを立骨状態とした際に,上下の骨からの力で偶力が生じないような適切な骨の構造を持つ,という考えである。この私達の骨の構造ゆえに,私達が重心を適切に位置づけて,体を支える骨の全てを立骨状態とした際に,その姿勢は理想的な姿勢アライメントとなる,という考えである。
これはヒトの骨の構造に対して都合のよい解釈のように思えるかもしれない。しかし,骨が受ける荷重によって,偶力が生じにくいように適応する形で骨が進化することは考えられることである。つまり,骨が合目的的に進化したもの,または成長するものとみれば,この考えはおかしいものではない。
重心の適切制御も,体の止まりやすさを重視した処置である。骨の関係と骨の構造が,それぞれ理想的な状態において,骨が動きにくくなる特徴を持っていると考えられることを述べた。理想的な状態において「骨の動きにくさ」という共通の特徴があると考えられることは,むしろ「立骨状態で全ての体を支える骨を積み上げたときに,姿勢の状態が理想的な姿勢アライメントとなる」という私の主張の蓋然性の高さを補うものといえると考えている。
(第1章その17につづく)
コメント