2. 体を支える骨を立てる制御(つづき)
立骨状態に制御することの利点と特徴
実行者がここで定義した立骨状態となるように体を制御することで,体を支える骨を動きにくい状態にできること,局所的な筋や靭帯の負担を減らせる,という利点を得る。そして,実行者が立骨状態となるように体を制御していくことの特徴としては,実行者に特別な制御態度が求められること,制御の仕方は上部の骨の向きを調節する制御となることが挙げられる。以下に,この利点と特徴が導ける理由を図1—1のような骨と筋の架空のモデルを用いて説明する。
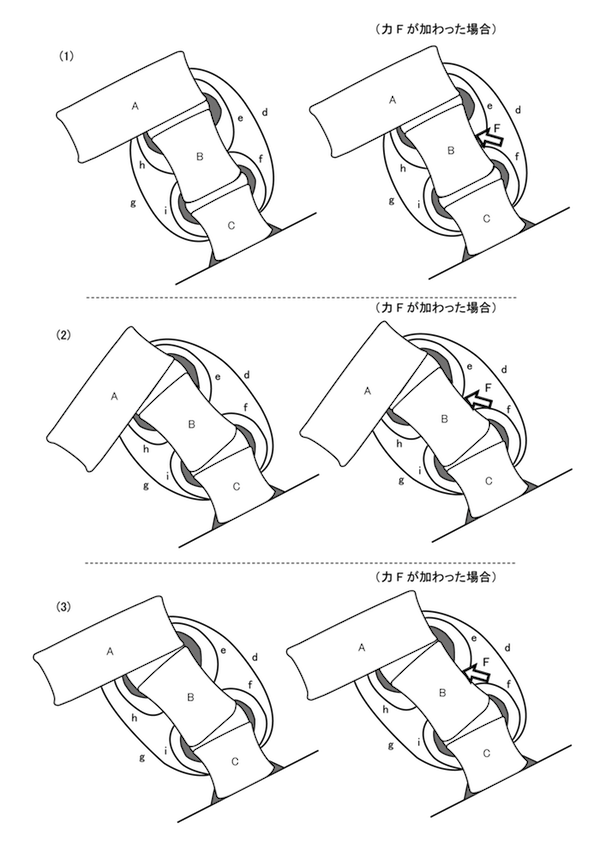
図1-1 骨と筋のモデル1
図は,架空の骨(A,B,C)が三つ縦に連なる構造を示したものである。それぞれの骨の間には椎間板があるとする。そして,靭帯が関節にあり,それぞれの骨に筋が付着する。筋は片側に三種類あり,AとC,AとB,BとCに付着する。右側に位置するものは,順にd,e,fとなり,左側はg,h,iとなる。靭帯もAとB,BとCを結びつけるように両側にあるものとする。下のCの骨は床面と接し,動かないように固定されていると仮定する。そして,このモデルは人と同様に制御する態度を持ち,その態度に応じて筋が反応して働くと仮定する。
実際の体の骨はそれぞれ形が異なり,弯曲もあって関節面も水平でなければ,非対称な構造から重さの偏りもある。上の骨が他に支えを受けずに下の骨に重さをかければ,関節で曲がる動きやずり落ちる動きが起こり,上の骨は止まれない。
こうした実際の体における状態の一例となるように,AがBやCに対して左にずれていて,Cが左に少し傾いている床面と接していて床面に固定されている状態を考える。この場合は,AやBは適切な支えがなければ,左側に回転し始め,また左側にずり落ちることになる。この状態で骨が止まるためには,曲げや剪断の力に拮抗する筋や靭帯といった張力が働く必要がある。
ここで,それぞれの骨に付着する筋や靭帯が働いて,AとBの骨の動きを止めた状態のことを考える。二つの止め方に分けて,それらを比較する。一つは,AとBのそれぞれ下の骨にかける荷重が最大面積荷重となるように制御した止め方である。図の(1)のようなものとなる。もう一つは,AとBをCの上に「乗せることを達成していればよい」「ただ乗せていればよい」ような止め方である。この場合は,図の(2)や(3)のように,AやBが下の骨の関節面に対して傾いて止まるような状態となるだろう。ここでは図の(2)や(3)の状態と,(1)との違いを考える。
(1)の状態では,Aはその関節面全体でBに荷重をかけており,Bもその関節面全体でCに荷重をかけている。AとBの骨が,このようにそれぞれ下の骨に最大面積荷重をかけて止まるためには,筋の働きによって関節の曲げの力と剪断の力が打ち消され,更に荷重の仕方が最大面積荷重となるように荷重の力の向きが調節される必要がある。
この際には,dとgの筋が用いられて,AがBにかける荷重の向きが調節されることになるだろう。隣接する骨をつなぐeやf,h,iの筋が働いてAとBのそれぞれを止めても,(2)の状態は実現される。しかし,回転半径が長い回転の動きを止められるdやgの筋が働いてAの向きを制御する仕方の方が,より少ない張力でその関係を維持できることになる。eやf,h,iの筋は,dやgの筋と比較すると,止められる回転の回転半径がより短くなり,それらが働いて(2)の状態を支える場合には,必要になる総じた張力はより大きくなるからである。ここでは,dやgの筋のように回転半径の長い回転を制御する筋のことをモーメントアームの長い筋とし,短い回転半径の回転を制御する筋をモーメントアームの短い筋と呼ぶ。
また,dとgの筋が働いて(1)のような骨の最大面積荷重の状態に留めれば,Aの荷重とCからの反力でBは回転する力を受けにくく,動きにくくなっているといえる。このため,eやf,h,iの筋はそれほど働かずともBが止まることになる。靭帯も伸長せず,張力を発揮していない。モーメントアームの短い局所的といえるeやf,h,iの筋や靭帯の負担は少なくなっている。
(1)のように制御するということは,様々な関係の状態があり得る中で,あえて最大面積荷重という特定の関係にするということである。これには,(1)のように制御する実行者の態度が求められるだろう。こうした態度に応じて合理的な筋反応が起こるとすれば,eやf,h,iの筋を用いるのではなく,最も効率的に止めることができるdやgの筋が用いられることになるだろう。ここでは,このモデルを擬人化して,このモデルの実行者が骨を最大面積荷重の関係にする態度を持つと仮定する。その上で,その態度に応じて合理的な筋反応が起こるものと仮定し,(2)ではdやgの筋が積極的に働くことになると考える。
この時の実行者が行っている制御の仕方は,dやgといったモーメントアームの長い筋を用いて最上段のAの骨の向きを調節し,AがBに最大面積荷重をかけ,BがCに最大面積荷重をかけるようにする制御となっている。
一方の(2)の止め方についてみていく。この場合は,AがBにかける荷重は左側に偏っている。Bは左側の端に近い方でAからの荷重を受ける一方で,Bの右側は荷重されなくなる。AがBにかける荷重は最大面積荷重ではない。そして,BがCにかける荷重も左側に偏っていて,やはり最大面積荷重ではない。
この場合は,AB関節とBC関節で曲げの動きが進んだ状態となることから,eやf側の靭帯が伸長される。これらの靭帯が限界近く伸ばされていれば,靭帯が張力を発揮することになる。この場合は,筋はそれほど働かなくともAとBを止められるだろう。靭帯が限界近くまで伸ばされていなければ,dの筋に加えて,eやfの筋がAとBを止めるために,収縮して張力を発揮することになる。dの筋が働いただけでは,Bが固定されにくいからである。dやgの筋は,eやf,h,iの筋の働きで不足する張力を補う形で働くことになるだろう。このため,dの担う張力は(1)に比べて減ることになるだろう。
靭帯張力が用いられるかに関わらず,この状態は結果的にモーメントアームの短い筋,または靭帯を状態維持のために動員している状態といえる。
(3)の場合も(2)と同様に,dやgの筋だけでなく,eやf,h,iの筋,またはf側の靭帯張力が張力を発揮することになる。dの筋は,これらの張力で不足する分を補うように働くだろう。この場合でも,dの担う張力は(1)に比べて減ることになるだろう。
この考察からいえることは,次のことである。(1)のような最大面積荷重の関係になるように制御する止め方の場合は,dやgの筋の働きが増える一方で,モーメントアームの短い筋や靭帯といった組織の負担は小さくなる。(2)のように「ただ乗せていればよい」とする止め方の場合は,dやgの筋の働きが減る一方で,モーメントアームの短い筋や靭帯といった組織の負担は大きくなる,ということである。この差をもたらした要素とは,最大面積荷重の関係で維持しようとする実行者の態度と,Aの荷重とCからの反力をBの固定に利用しているか否かである。
次に,骨を止めやすい特徴をより明確に示すために,Bの骨を回転させるような力がモデルに加わる場合を考え,そのときの(1)と(2)(3)の止め方による違いを考える。それぞれの図の下にその力が加わった様子を示した図を加えている。図のように,Bの右側からBをしゃくり上げるような形で,Bを左に倒すような力Fが働くこととする。
(1)の止め方の場合は,AがBに最大面積荷重をかけていることから,Fの力の働きによってBが左に回転するような力を受けた際に,Aは関節面全体から力を受けることになる。Aは動かされる力を瞬時に受けることになる。ここで,更なる力が加わる際にも最大面積荷重の関係に留めるような態度をモデルの実行者が持っているとする。このモデルの実行者は,元々,最大面積荷重の関係にする態度を持っていたことから,力が加わる状況下においても実行者がその態度を維持することは妥当であろう。また,合理的な筋反応が起こるとすれば,Fの力が働いてAを動かそうとする際に,この態度によってdやgの筋はすぐに拮抗するように働くこととなる。dやgの筋が拮抗するように働くことで,Aからの荷重はBの回転を抑制するように働くことになる。
dとgの筋は,両側からAを牽引し,AをBに押し付けるように働くことになる。dとgの筋の働きでBを止めるためには,BをCに押し付ける程度までdとgの筋がAを牽引する必要がある。ここまでdとgの筋が働いたとする。この場合は,BはAとCから最大面積の荷重と反力を受けることになり,回転せずに止まることになる。このため,eやf,h,iの筋はそれほど働かずともよくなる。
こうしたことから,(1)の場合は,Fの力が加わってもBは動きにくくなっているといえるだろう。また,力Fが加わらなかった時と同様に,AやBを止めるにあたっても,モーメントアームの短いeやf,h,iといった筋や靭帯の負担は少ない。Bを動きにくくしている要素とは,最大面積荷重の関係で維持しようとする実行者の態度と,Bが最大の面積で隣接する骨から力を受けていて回転しづらいことである。
次に,(2)の場合の止め方をみていく。この場合は,Fの力によってBが左に回転するような力を受けた際に,Bは回転する形で少し動いてしまいやすいだろう。一つの理由は,実行者の態度が「ただ乗せていればよい」というもので,特定の関係に留めようとする態度ではないことから,Bを止めるために働いていたfの筋もBに力が働いた際に瞬時に働かない可能性が高いからである。これに加えて,Aからの荷重とCからの反力を受ける面積が小さく,これらから固定される力を十分には受けていないからである。
この場合は,Bが少し回転を進めて,f側の靭帯が限界に近づき張力を発揮するか,fの筋が遅れて働いて張力を発揮し,その力がつり合えば止まることになる。はじめからf側の靭帯が限界近くまで伸ばされていれば,Fの力が加わっても靭帯張力がそれに拮抗し,Bは動かないかもしれない。靭帯に弾性がある場合は,完全に拮抗できず,Bは少し動いてしまうことになる。
このように(2)の場合は,モーメントアームの短いfの筋や靭帯が張力を発揮しつつ,Bが止まることになる。(3)についても同様な止め方となる。
この考察からいえることは次のことである。(1)のように最大面積荷重の関係になるように制御する止め方の場合は,Fの力が加わったときに,その態度と骨の関係からBやAの骨は動きにくくなっていることである。そして,力が加わっていない時と同様に,骨を支えるにあたって,モーメントアームの短い筋や靭帯の負担は軽減される。一方で,(2)や(3)の「ただ乗せればよい」という止め方の場合は,Fの力が加わったときに,その態度と骨の関係からBやAの骨は動いてしまいやすい。そして,モーメントアームの短い筋や靭帯の負担も増える。
このモデルでは特定の外力(F)を想定したが,これは動作時や呼吸時に肋骨を通じて脊柱の胸椎にかかる力を想定したものである。私達の体は,静止時においても,呼吸活動をしていたり,重心動揺があるなど,常に動いている。これらの活動による力が,体を支える骨には生じている。このように,静止時でも体を支える骨には常に動かされる力が働くことになる。このため,静止時においても,立骨状態を導く制御は実行者にとって一つのメリットとなる。
こうしたモデルの考察から,体を支える骨が立骨状態となるように制御される場合は,その態度と骨の関係によって,骨が動きにくくなり,モーメントアームの短い局所的な筋や靭帯の負担は軽減される,という利点を導くことができる。また,立骨状態にする制御の特徴としては,実行者に特別な制御態度が求められること,その制御の仕方は上部の骨の向きを調節する制御となることがいえる。
(第1章その4につづく)
※図の著作権は青木紀和に帰属する。
コメント