1. 目的動作達成の前提
私達が動作を行うということは,筋収縮させて,体の部位や体節を動かす,ということである。私達が動作をして目的を達成することには前提がある。一つの前提は,動作が行われながらも,実行者の体位が維持されることである。実行者が目的達成のために動いても,それによって自身の体が倒れてしまっては目的動作を達成できない。これは当然のことである。もう一つの前提は,動く骨がある一方で「動かない骨」があるということである。この動かない骨があることで,動く骨が目的通りに動くようになる。これは見落とされやすい前提である。誰もがこれらの前提を考慮せずとも,目的動作に近い動作を実現し,目的を達成してしまうため,これらの前提はあまり考慮されないものになる。しかし,ここに私は問題があると思っている。
目的動作達成において見落とされやすい前提となる,「動かない骨があること」ついてここで考える。
動作が行われる際には筋収縮が行われる。筋収縮によって特定の部位が動くことになる。筋は二つ以上の骨に付着し,その一つの骨を筋収縮の牽引の力によって動かす。この筋は筋収縮によって同時に,その筋が付着する「動く方ではない骨」をも牽引している。この筋収縮の牽引を受けても「動く方ではない骨」が動かなければ,動く方の骨が目的通りに動くことになる。
このことを,実行者が手に重りを持ち,前腕を肘で屈曲させて持ち上げるという動作で考える(図2−1)。この際には,上腕二頭筋が筋収縮する。上腕二頭筋は前腕の骨の橈骨と,肩甲骨に付着する。上腕二頭筋の収縮は,この双方を互いの方向に牽引することになる。そして,肩甲骨が動かなければ,上腕二頭筋の収縮によって橈骨が動くことになり,前腕が持ち上がるという目的の動きが実現される。しかし,逆に,肩甲骨が橈骨の方に動いてしまえば,前腕は持ち上がらず,目的の動きは実現されない。このことは,現実的には起こりにくいことであるが,こうした力が働いていないわけではない。肩甲骨はより動きにくく,かつそれを止める働きが無自覚で行われるために,私達がそれを認識しにくいだけである。
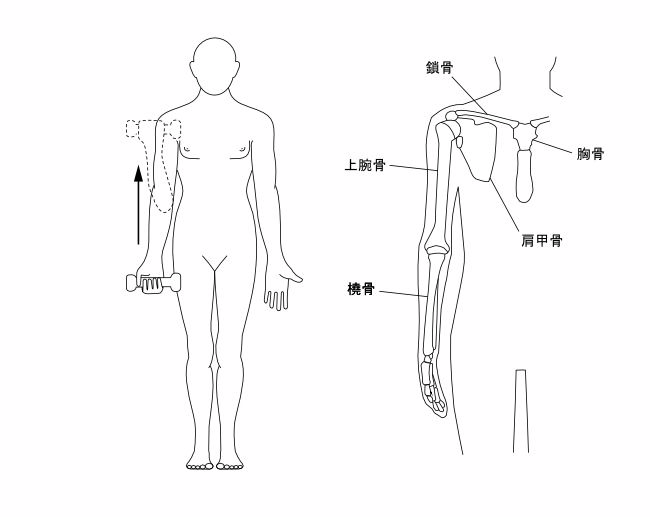
図2ー1 腕の動作 上肢の骨の構造
また,筋収縮によって特定の骨が関節で動くが,この場合は,関節で隣接する骨にも作用する力が生じる。隣接する骨が,この関節を通じて作用する力によって動いてしまうと,やはり目的の動きは実現されなくなる。
実行者が重りを持った前腕を肘で屈曲させて持ち上げるという前述の動作で,このことを考える。動く前腕の骨の橈骨は,肘関節で上腕骨と関節する。上腕二頭筋の筋収縮による橈骨を動かす力が生じれば,上腕骨は,橈骨から上腕骨の橈骨関節端が後方に押し出される力を受ける。その力を受けて,上腕骨の橈骨関節端である肘が後方に動いてしまうと,関節する橈骨も当然ながらその方向に動くことになる。この場合は,肘が曲がって前腕は持ち上がるものの,それが持ち上げられる位置がより後方に位置づけられることとなる。当初の目的とは異なる持ち上がり方となる。
動作時において,ある骨を動かす筋収縮によって,その筋の付着する「動く方ではない骨」が牽引を受けても動かず,「隣接する骨」が作用力を受けても動かないという前提が成り立って,はじめて目的の動作が目的通りに達成されることになる。こうしたことから,動かない骨があるということが,目的動作達成の前提といえるのである。
最初に述べたように,体位維持と動かない骨があること,という二つの前提が成り立って,はじめて目的の動作が達成されることになる。つまり,私達は,体位維持を行いながら,動くべきでない骨を止めて,動作をしているといえる。この二つの前提を更に掘り下げて考えると,大前提がみえてくる。この二つの前提は,どちらも共通する動かない骨を基に行われることである。動かない骨を基に体位維持が行われ,動かない骨を基に動くべきでない骨が止められることになる。動かない骨は共通することになるだろう。そして,体位維持は体を支える骨を止めることによって行われることから,共通する動かない骨とは,体を支える骨となる。体を支える骨の一部や全体を「動かない骨」として止めることが目的動作達成の大前提となる。
私達が動作をするということは,特定の部位を動かすという活動だけではなく,体を支える骨を止めて体位維持を行いながら,止まっている「体を支える骨」を基に,動くべきでない骨を止めておくという活動も含むのである。
ここで使った「骨を止める」という表現は,絶対的な空間的位置の抑止の意味だけでなく,相対的な関係の抑止の意味も含む。私達が立位を維持して腕だけ動かす際には,体を支える骨の絶対的な空間的位置は,ある程度抑止されることになるだろう。特に,足部については地面と接していて空間的位置は動きにくい。一方で,歩行動作では,体を支える骨の空間的位置は動くことになる。しかし,上半身の体を支える骨に関しては,空間的に移動しながらも,相対的な骨の関係は維持されているといえる。このことが,骨の相対的な関係の抑止ということである。
動作の際に,筋の牽引や関節を通じた作用力を受けながらも,体を支える骨の一部や全体,そして動くべきでない体の骨を止める実行者の活動のことを,「体の制動」とここでは呼ぶ。制動の活動は,動作時における体位維持活動の一つとなる。動作時における体位維持活動には,この制動の活動の他に,動作で姿勢が変わることによる重心変位への対処のための活動がある。
この制動と姿勢変化による重心変位への対処が適切になされない場合で,最悪の場合は,実行者が倒れることになる。その場合は,実行者の動作は当然達成されない。仮に実行者が倒れず,その動作が達成されたとする。しかし,この制動と重心変位への対処である体位維持活動がその動作時にどれだけ適切になされたかで,その実行者の負担が軽減されて,パフォーマンスがよりよいものとなると考えている。本章では,その一つの制動の適切な対処について述べ,重心変位への対処については次章で述べる。
(第2章その2につづく)
コメント