2. モデルでみる動作時の有利な体位維持の仕方
動作時には,第1章で説明した立骨重心制御による体位維持の仕方が,制動にとっても有利な体位維持の仕方となると考えている。つまり,立骨重心制御状態で行う動作の仕方が,有利な動作の仕方となると考えている。これを以下に詳しく説明するが,人の体の動作については後述するものの,より複雑になるため,まずは図2−2の簡略化したモデルを用いて述べることにする。
モデルにおいて働く力と前提
図2−2(1)の左図のような骨と筋のモデルを想定する。3つの骨A,B,Cが上下に連なっている。AとBは椎骨の椎体連結状のように関節し,その関節の間には椎間板があるものとする。BとCの関節は,蝶番関節となっている。第1章のモデルと同様に筋が骨に付着し,関係性を維持している。それらは図のd,e,f,g,h,iで示されている。各関節には靭帯もあり,関節を外れさせないようにしている。また,Bの骨には図のようにRの骨が関節し,AとCの骨にそれぞれjの筋と,kの筋でつなぎとめられている。BとRの関節は,蝶番関節とする。A,B,C,R,tには一定の質量があるものとする。
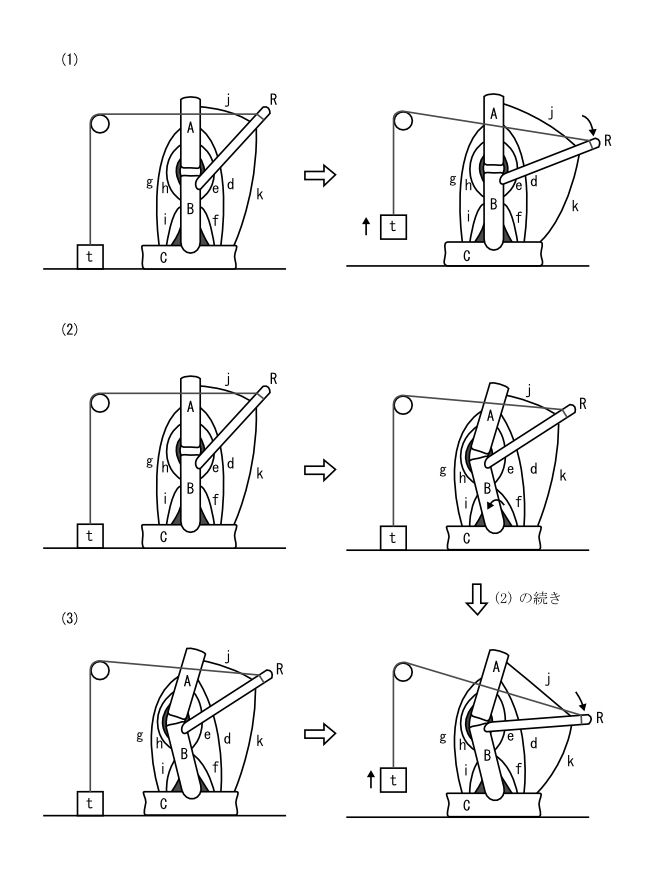
図2−2 骨と筋のモデル3
このモデルはある運動をする。その目的の運動は,図の(1)の右図のように,kの筋が筋収縮することで,Rの骨の遠位側(右側)を下方に動かし,Rの遠位端(右端)とひもでつながる重りtを持ち上げるという運動である。
この運動の時に,モデルに働く力について考え,前提としていくことを述べる。
kの筋収縮は,Rを下方に牽引して傾けようとするが,同時にもう一方の付着部であるCも右上方に牽引することになる。Cがこの力を受けてRの方に動いてしまう場合は,Rは右側に傾くことはできず,kの筋収縮によって重りtを持ち上げることはできない。重りtを持ち上げるためには,kの筋収縮力によってCが牽引を受けても動かないことが必要である。
また,kの筋収縮はRを下方に牽引して動かすが,それは同時にRB関節を通じて,Bの骨を左側に傾ける力を生じさせる。実際にこの力を受けて動いてしまった状態が図の(2)の右図である。この力を,kの筋収縮によって起こる「RのBへの作用力」と呼ぶ。Bがこの力を受けて動いてしまう場合は,Rは下に動いても,重りtを持ち上げることはできない。目的の動作が達成されるには,関節を通じた作用力を受けてもBが止まる必要がある。これを実現するためには,dやg,fやiの筋を中心に筋が適切に働く必要がある。
そして,これらの筋はCに付着して働くことから,Cをそれぞれの方向に牽引することになる。この牽引を受けてCが動いてしまえば,Bも動いてしまう。その場合も,やはり目的の動作は達成されない。Bが止まるためには,Cが止まっている必要がある。
これらのことが表すことは,kの筋収縮が起こってもBやCが動いてしまえば,kの筋収縮力が目的の仕事に転化されなくなり,その筋収縮力はBやCを動かす仕事に用いられることになる,ということである。kの筋収縮力が,Rを右に傾けて重りtを持ち上げるという目的の仕事に転化されるためには,BやCが止められる必要がある。
このモデルにおいて目的の動作が達成されるためには,Cが止まっていることが求められる。Cが動きにくくなる状態は,Cが床面を押す荷重の力が,Cに生じる筋の牽引力を十分に上回る状態である。この状態では,Cの接面部と床面との間に摩擦が生じ,それもCが止まることに貢献する。ここでは,Cが接面部で床面に十分な荷重をかけていて,Cの接面部と床面には摩擦力が働いていることとし,kの筋収縮や他の筋の筋収縮を受けてもCは動かないことを仮定する。また,モデル全体の重心はCの中心部上にあり,骨がどちらかに傾いて倒れるなどの過度な動きがない限り,動いてもその影響が軽微であると仮定する。
また,kの筋収縮により,Rが下方に動くが,その際にjは伸張される。このため,Aにも牽引の力が生じる。この牽引の力でAが右側に傾く形で動いてしまえば,AB関節を通じてBに左側に傾く力を与えることになる。また,AがRと共に動く場合は,Aが大きく傾くことになり,AとBをCの上に乗せる関係ではなくなり,重心乖離の影響が過度で無視できなくなることから,AはB上で適度に止められる必要があることとする。そして,jの筋については十分に伸長できることを仮定する。
また,このモデルにおいても,第1章のモデルと同じくヒトと同様に制御する態度を持ち,その態度に応じて合理的に筋が反応するものとする。
骨と筋の役割を整理すれば,Rが動く骨であり,kの筋収縮が目的動作のための筋収縮である。このモデルを体とみれば,A,B,Cは「体を支える骨」になると同時に「動くべきではない骨」にあたり,A,B,Cを止める活動が「制動」といえる。
立骨制御と骨傾斜容認による動作の違い
こうした特徴を持つモデルを考察し,動作時における立骨制御の有利性を,骨傾斜容認と比較しながら述べることにする。重心制御については,AやBが傾いて倒れるなどの過度な動きでなければその影響が軽微である仮定から,ここでは考慮に入れずに考える。
次の三つの場合を考える。(1)は立骨制御の場合で,AとBの骨がCの上で直立安定し続けている状態で,kが働くときの場合である。(2)は骨傾斜容認の場合で,AとBの直立状態からkが働いて,Bが少し動いた後に止まる場合である。(3)は同じく骨傾斜容認の場合で,Bが元々左側に傾いた状態から,kが働くときの場合である。そして,(2)と(3)の骨傾斜容認の場合を,(1)の立骨制御の場合と比較し,立骨制御の態度と状態の有利性をみていく。図2−2の(1)から(3)でこれらを図示している。
(1) 立骨制御の場合:AとBが直立安定し続けている状態で,kが働く
AとBとCは直立の関係で,荷重の偏りがない最大面積荷重の関係となっている。AとBは,それぞれの下のBとCの関節面に最大面積荷重をかけている。そして,実行者は,この特定の関係を動作中も維持する態度を持つ。
目的動作のためのkの筋収縮によって,BにはRからの作用力が働く。その力は,Bを左に傾ける力となる。しかし,実行者の特定の関係に維持する態度があることから,筋が働いてBが抑止される。Bを直接的に支えるfやiの筋が働くと同時に,dやgの筋も働く。dやgの筋は,Aの骨の向きを調節して,AがBに最大面積荷重をかける状態を維持するように働く。これらはBの抑止に間接的に働く。AやBは,左右の筋の働きによってそれぞれ下方に牽引され,直立の状態を保ちながら,下の骨に押し付けられることになる。この場合は,Cの骨が止まっていることから,BはCから最大面積荷重の反力を受けて止まり,AもBの上で止まることになる。
AとBは直立して止められたまま,kの筋収縮によってRが動かされ,重りtが持ち上がる。(1)は立骨制御状態が維持された状態であり,その有利性を(2)と(3)の記述の中で比較していく。
(2) 骨傾斜容認の場合:AとBの直立状態からkが働き,Bが動いた後に止まる
AとBが直立する状態から,kの筋収縮が働きはじめるとする。重りtを持ち上げるという目的を達成するにあたっては,Bは必ずしも直立状態で固定されなければならないわけではない。kの筋収縮による作用力を受けて,Bが多少動いて,左に傾いても,fやiの筋の働きでBが動いたところで止まれば,その時点からkの筋収縮によって重りtが持ち上がることになる[21]。ここでは,実行者が骨傾斜容認で骨を特定の関係に留める態度ではないことから,Bが少し動いてから止まったとする。
まずは,kの筋収縮について考える。この場合は,Bが止まるまでの間にもkの筋収縮が進むことになる。しかし,その筋収縮は,Bが止まらないことから,重りtを持ち上げる仕事には貢献していない。そして,Bが止まった段階から,kの筋収縮は目的の仕事に貢献することになる。
kの筋は,kの筋収縮がある程度進んだ状態から,更に筋収縮を進ませて目的仕事に貢献していくことになる。kは,(1)の時以上に筋収縮を進ませているといえる。(1)では,kの筋は,その最初の収縮から目的仕事に貢献していたからである。このため,この場合では,kの筋収縮の目的仕事に転化される効率(以降は目的仕事転化効率とする)が,(1)よりも悪化したといえる。
また,この状態では更に筋効率が悪化する要因が考えられる。筋収縮を進ませるということは,筋線維が短縮した状態から更に収縮をさせるということである。図のようにkの筋の両付着部が近づいた状態で,筋長が短縮した状態での収縮となる。この筋線維が短縮した状態からの収縮では,筋が生み出す張力が低下することが考えられる。これは,骨格筋の長さと張力の関係から考えられることである。骨格筋の張力は筋線維の一単位である筋節の長さによって変わり,最適な長さから短縮されているほど発生可能な張力が減少する[22]。モデルの実行者が,筋の発揮できる張力の低下した状態で同じ仕事を達成しようとすれば,実行者はその仕事を達成するためにより収縮を進ませる必要があることになる。
(1)では,kの筋収縮は,その最初の収縮からRを動かして重りtを持ち上げる仕事に転化される。また,(2)のようには短縮していない状態からの目的仕事への張力の発揮となる。(1)の状態におけるkの筋の長さが,kの筋にとって最適なものであるとすれば,kの筋は最大に近い張力を発揮している状態となる。(1)の場合は(2)の状態よりも,kの筋収縮が進まずに,目的仕事が達成されることになる。
このことから,AとBの直立状態からkが働いて,Bが少し動いた後に止まる状態で目的動作が行われた場合,kの筋収縮の目的仕事転化効率は悪化するといえる。つまり,(2)の状態では,同じ仕事を達成するために,実行者はより多く筋収縮を進めなければならなくなる,ということである。このことから,実行者は,(2)の自身の動作の仕方を「重たい動作」と感じることになるだろう。
また,(2)では,kの筋収縮による力が最初からではなく,ある程度進んだ状態からはじめて目的仕事に転化されることになった。実行者は,このことを「力の発揮の反応の後れ」と感じるだろう。実行者が目的動作をしようとして筋収縮を起こすものの,目的動作に力が発揮されず,少し後れて目的動作に力が発揮される感覚を得ることになるからである。この反応の後れも,実行者には「重たい動作」と感じられる要素となるだろう。
ここまでは,Bが動いてしまうことのkの筋収縮への影響を述べたが,影響はこれだけではなく,Bを止める制動の働きにも及ぶ。fやiなどの筋が制動の働きを担い,Bの動きが止められて,kの筋収縮の働きで重りtが持ち上がることになる。実行者の態度は骨傾斜容認の態度であることから,Aも,Bを止めるように位置づけられるわけではなく,jの筋の牽引を受けて倒れないように筋で止められているだけとなる。このため,全体の状態は図(2)の右図のような状態となり,Bは骨傾斜状態で止まることになるだろう。Bが動いて骨傾斜状態で止まることは,制動の働きに以下に述べる不利な要素がある。
一つ目の不利な要素は,Bを止めるにあたって,Aを用いてBを止めようとする働きがないことから,モーメントアームの短いfやiの筋や靭帯張力がより動員されることとなり,これらの負担が増えることである。これは前章で述べた骨傾斜の状態における不利な特徴の一つである。
二つ目は,上下の骨を通じた力によってBに偶力が生じていることである。これは,Bの左側への傾きによって,Aからの荷重とCからの反力の向きにずれが生じるからである。この状態でBを止めるために,fやiの筋は,Rからの作用力に拮抗するだけでなく,偶力による力のモーメントも支える必要がある。
(1)の場合では,筋の働きによって最初から直立した状態で骨が止められていたことから,この荷重と反力による偶力は生じていない。(1)と比べれば,骨傾斜した(2)の状態では,fやiの筋はBを止めるために筋緊張をより強めることになる。関節が曲がる限界に近ければf側の靭帯も張力を発揮することになる。
一つ目と二つ目の不利な要素を合わせて考えると,(1)の立骨制御した状態では,Aの荷重とCからの反力がBを止めるために活かされているといえるだろう。一方で,(2)の骨傾斜した状態では,これらが活かされていないために,Bを止めるためのfやiの筋緊張がより強いものになったといえる。
三つ目の不利な要素は,iやfの制動のための筋収縮の目的仕事転化効率が悪化することである。iの筋は,fの筋に拮抗するように,BをCの方に牽引する形で働くことになる。しかし,iの筋はBを止めるために収縮をするものの,Bが近づく形で動いてしまうことから,動いている間は収縮を進めることになる。fの筋が働いて牽引力がつり合う形でBの動きが止まるまで,iは筋収縮を進めることになる。その時に,iの筋は,両端の付着部が近づいて,筋線維が短縮した状態から張力を発揮することとなる。このため,発揮できる張力が低下しやすい状態で拮抗の働きを担うこととなる。こうしたことから,iの筋は,筋収縮を(1)の時よりも進めることになるといえる。これは,kの筋収縮と同様に,Bが動いてしまうことで,制動の働きを担うiの筋の目的仕事転化効率が悪化することを示している。
iの筋は,(2)の場合は(1)の場合以上に筋収縮を進めることになる。それは二つの理由からである。一つは,Bが傾斜したことからBに偶力が生じ,その不安定な状態のBをfと共に支えるためである。もう一つは,Bが動いてしまうことによってiの筋収縮の目的仕事転化効率が悪化したためである。つまり,筋効率が悪い状態でより張力を発揮する必要性から,iは二重の意味で筋収縮を進めることになるといえる。
Bがiの側に傾斜して動くことから,iの筋は収縮を進めて短縮する形で働くことになり,iの筋の効率が悪化した。一方で,Bがこの傾斜をする際には,fの筋は伸張されることになる。(1)の状態がfの筋にとって最適に働く状態だとすれば,(2)の状態ではfの筋は最適な状態から伸張された状態で働くことになる。このように,fの筋も影響を受ける。しかし,この場合におけるfの筋が発揮する張力は,伸張によって増加することが考えられるため,fの筋の影響はiの筋の影響とは異なるといえる。
筋の張力には,筋線維収縮によって得られる活動張力と筋の弾性的な素材特徴ともいえる受動張力がある。筋が発揮できる張力は,この二つの張力の合計の張力である。活動張力は,先に挙げた骨格筋の長さと張力の関係から,筋の長さが最適な長さから短縮していたり,伸張していれば,低下する。受動張力は,筋の長さが最適な長さから伸張している際に増加する。この受動張力の働きがあることから,筋の全張力は筋の長さが長くなるほど大きくなりやすい(図2−3)。
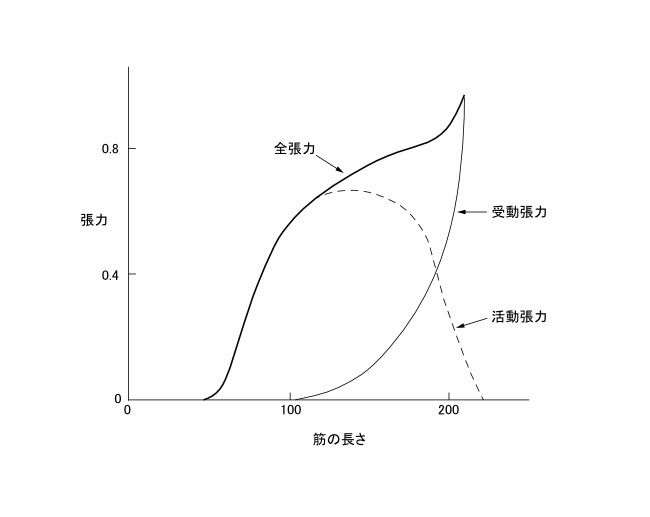
図2ー3 筋の長さと張力の関係
筋が最適な長さよりも伸張される際は,この受動張力が働くことになり,筋収縮による活動張力と合わせた全張力は増加しやすい。このため,活動張力は低下して筋収縮の目的仕事転化効率は悪化するものの,その効率の低下の仕方は筋の短縮時ほどにはならないといえる。
このことから,iの筋と同様に,fの筋も筋収縮を(1)の時よりは進める必要はあるものの,筋収縮の効率悪化の度合いは,iの筋ほどではないといえる。
また,この場合はdやgの筋収縮についても,目的仕事転化効率が悪化することになる。Bが動いてしまう間は,Aに反力が返されなくなることから,Aを止めるためのdやgの筋はより筋収縮を進めることとなる。特にdの筋は,(1)のときよりも筋収縮を進めることになる。
三つ目の不利な要素でみてきたように,Bが動いてしまうことで制動のための筋の目的仕事転化効率が悪化して,制動の筋がより筋収縮を進めることになる。実行者がこのBを止めるための制動の筋群の筋緊張を強くすることも,実行者が「重たい動作」と感じる要素となるだろう。
四つ目は,Bが止まった後もBの不安定な状態が継続することである。Bが止まったとしても,AがBにかける荷重には偏りがあり,Bが回転しやすくなっていることには変わりない。(2)の場合でも,Bは筋の働きによって止まるだろうが,止まるために筋緊張の依存度が高いことに加えて,その回転しやすい状態ゆえに,(2)の状態は(1)に比べれば,Bが不安定な状態であるといえる。このため,kの筋収縮の力が強まるなどで,Rからの作用力が大きくなれば,Bは動いてしまいやすい。
筋収縮は運動神経反応を要し,そのタイミングと収縮程度の制御が必要なものである。また,筋は,張力を発揮する弾性組織であり,反発係数の高い硬性の骨とは素材的にも機能的にも異なる。筋が利用される場合には,張力発揮のタイミングがずれる,必要な張力が満たされないといったことが起こる可能性がある。靭帯は,張力を発揮する組織であるが,筋のように必要なタイミングで自発的に張力を発揮できるわけではない。これらに比べて,骨は反発係数が高く,止まっている下の骨や床面の上で止められている状態であれば,受けた力を瞬時に最大限に,そして自動的に反対側に返すことができる。Cの骨もAやBと同様に床面に対して直立で,垂直方向の反力を瞬時に最大限に返せる形でいれば,それはCが床面から得る床反力をCとBを通じてAまで瞬時に最大限に返せていることを示している。
こうしたことから,筋や靭帯といった組織が適切な力を発揮できるかどうかの確実性は,骨が直立した状態で床反力や骨を通じた反力を返す確実性に比べれば低いといえる。このことから,(2)の状態は,(1)のように骨の荷重と反力を活かし,止まるために筋緊張の依存度の低い状態と比べれば,Bがより動きやすい状態といえる。そして,Bが動いてしまえば,kの筋収縮の目的仕事転化効率の悪化,iやf,dやgの筋収縮の目的仕事転化効率の悪化を導くことになる。これらの筋はより筋収縮を進めることとなる。
以上の四つのことが,Bが動いて骨傾斜状態となった時の制動における不利な要素である。
(3) 骨傾斜容認の場合:Bが元々左側に傾いた状態から,kが働く
図の(3)のように,はじめからBが左側に傾いた状態であった場合を考える。これは,モデルの実行者が最初から骨傾斜を容認している状態である。この場合でもkの筋が働いて,fやiなどの筋の働きでBが抑止されれば,重りtを持ち上げることができる。しかし,この状態は(2)と同様に不利な状態となる。不利な影響も(2)と同様である。
(3)の場合には,iの筋にたるみが起きている場合もあるだろう。iの筋が最大限に弛緩した時の長さよりも,両付着部の距離が短くなっていて,iの筋が弛緩していれば,iの筋にはたるみが生じることになる。(3)の元々の状態で,Bの傾斜がfの筋や靭帯に支えられていたとすれば,iの筋は働く必要性が少なく,iの筋は弛緩することができる状態である。このため,iの筋にはBの傾斜次第では,たるみが生じることになる。たるみがある場合は,iの筋は筋収縮でそのたるみを解消した上で,Bを止める張力を発揮することになる。
ここでは,Cの抑止と筋が態度に応じて合理的に働くという前提に加えて,(1)の直立状態における筋の長さが,それぞれの筋が最大活動張力を発揮する筋の長さとなり,それより伸張された際には受動張力が増加し,全張力が増加することを前提とした。
このモデルの考察から得られることは以下のことである。
・動作時に,動作のための筋の牽引や骨を通じた作用力で,動くべきではない骨が動かされて,その筋が短縮する状態で働くことになれば,動作のための筋収縮の目的仕事転化効率が悪化することになる。
・体を支える骨が動いて体位状態が骨傾斜状態になる場合は,体を支える骨を止めるために筋緊張がより強くなる。その理由は,局所的な筋が用いられて筋緊張を強めること,上の骨からの荷重と下の骨からの反力によって偶力が生じやすいこと,制動のための筋収縮の目的仕事転化効率が悪化することである。
・実行者が骨傾斜容認の態度でいれば,動作による筋の牽引や骨を通じた作用力により,体を支える骨が動いてしまいやすく,動作のための筋収縮の目的仕事転化効率が悪化しやすい。また,体位維持のために全体的により筋緊張が強くなりやすい。
・実行者が立骨重心制御の態度でいれば,体を支える骨は立骨状態で止められることになる。このため,動作のための筋収縮の目的仕事転化効率は悪化しない。また,体位維持にあたって,局所的な筋や靭帯の利用は適度に抑制され,制動の筋群の目的仕事転化効率も悪化しないことから,最小限の筋緊張で体位維持が実現される。
(第2章その3につづく)
脚注
[21] この場合はRの動く軌道が変わることになる。ここではRの軌道が変わっても目的は達成されるものとした。
[22] 筋原線維の筋節の長さが約2.0〜2.4μmのとき(ほとんどの骨格筋では弛緩時の筋節の長さ)が最適で,筋線維は最大張力を発生する。最適な長さから短縮されるほど,または伸長されるほど発生可能な張力は減少する。(Gerard J. Tortora,Bryan Derrickson(大野忠雄他訳) 『トートラ 人体の構造と機能』(原著第11版,邦訳第2版) 丸善,2007年。)

(骨格筋の構造と機能なら下記の本が詳しい)

コメント