3. 実際の体の動作における体位維持の仕方による違い
モデルと実際の体との違い
前節では,モデルにおける動作時の体位維持の仕方による違いについて述べた。このモデルは架空の構造であり,実際の体とはかけ離れているものである。しかし,このモデルから考察できたことは,実際の体の動作時に起こることを適確に表現していると考えている。そして,実際の体についてもあてはめられると考えている。
モデルと実際の体はかけ離れており,細部まで含めての全ての違いをここで挙げることはしない。実際の体における具体的な影響は,実際の体の動作としての例で示すことにする。しかし,それをみていくにあたって,モデルと実際の体との違いとして留意しておくことを,以下に述べる。
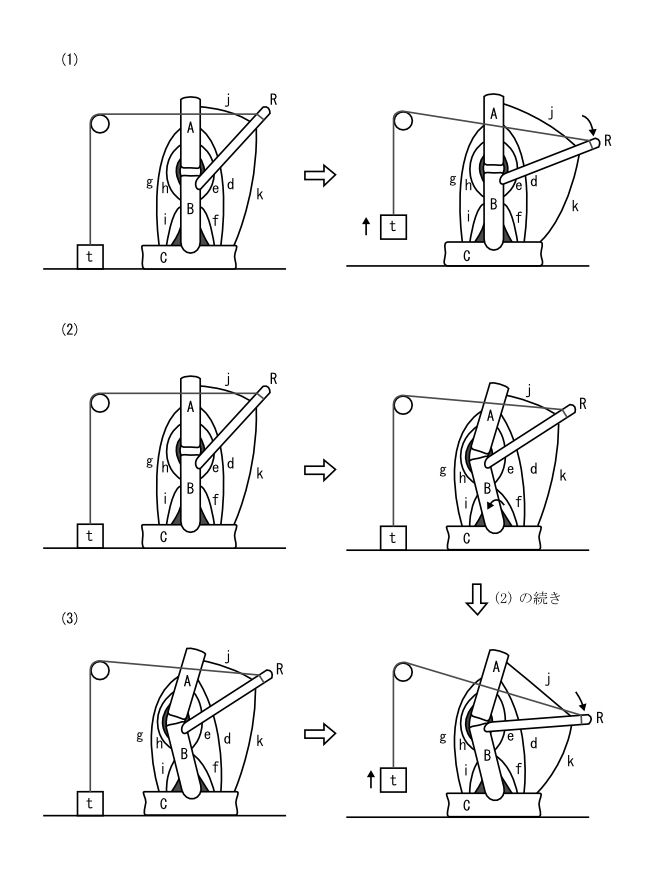
(再掲)図2−2 骨と筋のモデル3
一つ目は,モデルでは,A,B,Cは体を支える骨であり,Rの骨がその体を支える骨のBと関節する構造であった。この場合は,Rと隣接する「動くべきでない骨(B)」が「体を支える骨」であったため,Rの動作によって体を支える骨に直接的に動かされる力が働くことになった。実際の体では,動く骨と隣接する「動くべきでない骨」が「体を支える骨」ではない場合がある。しかし,「体を支える骨」には「動くべきでない骨」を通じて,間接的に動かされる力が働くことになり,結果的にモデルと同じ影響が及ぶことになる。
例えば,Rを腕の骨と考える。腕となる上肢の骨は,胴体の胸骨と関節する。腕が動く場合は,胸骨が「動くべきでない骨」となるが,胸骨は「体を支える骨」ではない。しかし,胸骨は肋骨と関節し,その肋骨が「体を支える骨」となる胸椎と関節する。胸骨に働く力は,肋骨を介して脊柱の胸椎にも伝えられることになる。そして,脊柱が動かされれば,胸骨も動いてしまうことになり,結果的にモデルと同じ影響が及ぶことになる。
モデルと同じように,動く骨に隣接する「動くべきでない骨」が「体を支える骨」である場合もある。いずれの場合でも,動作時には「体を支える骨」に動かされる力が働くことになる。効率的な動作のためには,体を支える骨を止めて,動作する骨に隣接する「動くべきでない骨」を止めることが,実行者には求められる。
二つ目の留意すべきことは,モデルではBが動いてしまうことで,Aからの荷重とCからの反力によってBに偶力が生じたが,実際の体では骨盤が骨傾斜する際にこの偶力が生じることになる。
三つ目は,筋が最大活動張力を発揮する筋の長さについてである。モデルでは,(1)の直立状態が,それぞれの筋が最大活動張力を発揮する筋の長さの状態となると仮定した。実際の体において,動作や姿勢制御に用いられるのは骨格筋となる。骨格筋では,その筋の弛緩時における長さが筋線維が最大活動張力を起こせる長さに近いと考えられている[23]。このため,一般的に理想的とされる姿勢アライメントの状態では,それぞれの筋が最大活動張力を起こせる状態に近いものとなり,屈曲や伸展が生じて筋の働く長さがその状態よりも短くなれば,発揮できる張力が低下することになりやすいと考えられる。
活動張力が最大に近く,大きく低下しない筋線維の長さの領域のことを,プラトー領域という。骨傾斜で関節が動いてしまった時の筋の長さが,プラトー領域に収まるのか,それとも張力が低下する領域に至るのかは,個別の筋において調べる必要があり,わからない。個別の筋としてはわかっていないものの,短縮時に張力が低下する可能性は長さと張力の関係から推定できることであり,それをここでは私の考えとして述べている。
筋が短縮して働く際には,筋の発揮できる張力が低下していなくとも,筋は収縮を進めた上で目的仕事のために張力を発揮することから,筋収縮は必要以上に進むこととなる。その筋収縮の目的仕事転化効率が悪化することは変わらないと考えている。
四つ目は,支持部位の荷重の仕方と重心制御についてである。モデルでは,支持部位となるCにおいてBC関節の左右両側に筋が付着することから,左右均等になるように支持部位の接面部全体で床面に荷重していることの利点を述べた。実際の体の立位では,支持部位は足部である。左右二対の足底で偏りなく荷重していることと,それぞれの足底において前後に偏りなく荷重していることが,有利な状態となる。実行者は,特に足底における前後の荷重の偏りをなくすようにするとよい。なぜなら,足部も含めて体は前後が非対称な構造であり,前後の方が偏りが大きくなりやすいことに加え,脚部を支える主たる筋は足部の前後に付着するからである。
モデルの図上における正面視の構造は,立位時の体の側方視の構造に相当する。BC関節は足関節に相当する。筋は,足部の前後で,体を支える骨となる脛骨や大腿骨に起始し,足部の指側と踵側に停止する。足底の前後で偏りなく最大面積荷重がかかっていることが,これらの筋が体を支える骨を止める働きを効率的に担える環境となる。
足関節は踵側に偏った位置にある。実行者は,足底の前後に偏りなく最大面積荷重をかけるにあたって,体の重心が足関節よりも少し前に投射されるように制御することになる。
これらのことが,モデルと実際の体との違いとして留意しておくことである。
次に,実際の体における動作時に,どのように体を支える骨に動かされる力が働くのか,そして,立骨重心制御と骨傾斜容認,重心乖離容認の態度や状態でどのように差が出るのかを具体的に挙げ,モデルから考察されたことが実際の体にも当てはめられることを述べる。つまり,立骨重心制御による体位維持の仕方が,動作時において有利な体位維持となることを述べる。動作の具体例として,上肢を動かす動作,発声をここでは挙げる。
脚注
[23] 通常骨格筋は骨(腱を介して)や弾力のない組織に強固に固定されているので,弛緩時の筋線維の長さは適切な長さに極めて近いとされている(Gerard J. Tortora『トートラ 人体の構造と機能』,2007年)。
コメント