1. 姿勢変化による重心変位への対処
動作時には,動作のための筋収縮による牽引や関節を通じた作用力が体を支える骨に生じるため,その対処である制動が実行者に求められることを前章で述べた。これに加えて,動作時には姿勢が変わることによる重心変位への対処も実行者に求められる。例えば,実行者が腕を体の前に伸ばして支えるようにして立つ場合の姿勢では,腕を下げている姿勢と比べると,腕の重量分が体の前側にかかるため,起こしている体の重心はより前方に移動する。この際に,実行者が体を動かさなければ,重心が支持基底面上の適切位置から乖離することになり,体の倒れる力を支えるために筋緊張は強いものとなる。このようになんらかの対処が実行者に求められることになる。
腕だけでなく,脚,頭などを動かす,体幹全体を動かす(歩く,椅子から立つ・座る,中腰になる)際を含め,体を動かす行為においては,起こしている体の重心の位置が移動する。このため,重心が支持基底面上の適切な位置から乖離することになり,実行者にはその対処が求められる。
この重心変位への対処方法は二つある。一つの方法は,実行者は重心を適切位置から乖離させたまま,新しく生じた力のモーメントを筋緊張で支えることである。もう一つの方法は,移動する重心を支持基底面上の適切位置に位置づけるように,実行者が体を動かすことである。つまり,実行者が目的の動作とは別に,体位維持のための動作をするということである。この場合,実行者は,体を支える骨を動かす必要があり,そのどこかを傾斜させて,体の重量を前後左右で均等に配置していくことになる。先の腕の動作における対処例としては,実行者が足関節を動かして体全体を少し後方に位置づけるという対処となる。こうすることで,実行者は,前方に移動した重心を支持基底面上の適切位置に位置づけることができる。
一定の割合の人は,この二つの方法を折衷して両方行っていると考えている。それは,実行者が骨盤や脊柱を傾斜させて,重心を適切位置よりも後方に乖離させて,生じた力のモーメントを筋緊張で維持する,という対処の仕方である。この対処の仕方は不利なものとなり,一定の割合の人は不利なものを無思慮に行っていると考えている。
先の腕の動作で陥りやすい対処の仕方を述べる。腕の動作によって前方に重心が移動することから,実行者は上半身を後ろに傾ける形で後方に重心を戻そうとする。この際に,実行者は骨盤を後傾させて胴体を後方に傾け,骨盤を前方にスライドさせる(図3−1(2))。そして,こうした骨の傾斜を支えるために,腹筋群や腸腰筋,大腿四頭筋といった前側の筋群を筋緊張させることになる。胴体や頭がより後方に位置づけられる結果,重心は後方に戻される。この対処によって重心が適切位置に位置づけられればまだよいのだが,重心が戻るべき適切位置を通過して,更に後方に位置づけられてしまいやすい。この場合は,上半身に後方に倒れる力が生じることになり,実行者は前側の筋群の筋緊張をより強くすることになる。また,実行者がこの骨盤スライド後傾や重心の後方への乖離を起こす場合は,頭頸部の支え方が変わることになり,実行者は首の筋群の筋緊張も強くすることになる。
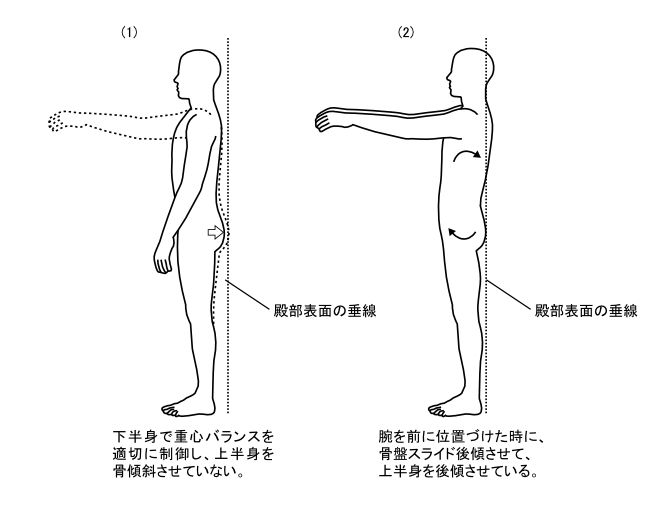
図3ー1 腕を持ち上げる時の姿勢変化
この対処の仕方には,二つの不利な要素がある。
一つは,実行者が重心を適切位置から乖離させてしまっていることである。実行者は重心を乖離させなければ,体の後方に倒れる力を抑制でき,それを支える筋緊張も抑制できたのである。これは,実行者の動作時における重心乖離容認の態度によるものといえる。
もう一つの不利な要素は,骨の傾斜の仕方であり,実行者が骨盤スライド後傾を起こすなど,上半身で骨傾斜させてしまったことである。実行者が骨盤スライド後傾を起こしたことで,実行者は脊柱を立骨状態としにくくなる。そして,腹筋群と首の筋群の筋緊張を強くしてしまうことになる。腹筋群緊張が体位維持に求められれば,その分腹筋群の呼吸活動への自由度が失われ,実行者の呼吸活動は制約されることになる。また,骨盤と脊柱が骨傾斜の状態となることから,靭帯や椎間板への負担が大きくなる。特に,腰椎の椎間板や腰椎と骨盤の靭帯の負担は大きくなる。これらは腰痛にもつながる負担となる。また,首の筋緊張が強い場合は,首のこりや痛みにつながる。このように,実行者が上半身の体を支える骨を骨傾斜の状態とした場合は,体に問題となりやすい負担を与えやすい。
有利な対処の仕方は,この二つの不利な要素を是正したものである。有利な対処の仕方は,実行者が重心乖離を容認せず,重心を支持基底面上の適切位置に位置づけることである。そして,それを実現するにあたって骨盤スライド後傾を起こさないように脚を用いることである。
腕の動作の例で有利な対処の仕方を述べる。実行者は,足関節で体を少し後方に傾斜させて,前方に移動した重心を足底上の適切位置に位置づける。そして,骨盤を含む上半身の体を支える骨は立骨状態を維持するのである。実行者は,骨盤を立骨状態にするにあたって,股関節を若干屈曲させることになる(図3−1(1))。実行者はこのようにすることで,重心を適切に位置づけながら骨盤スライド後傾を起こさずに,脊柱の立骨状態を維持できる。腹筋群や首の筋群の筋緊張を最小限のものに留められ,問題になりやすい負担を最小限のものに留められる。この処置によって脚の筋群には負担が生じることになるものの,この処置は呼吸を制約するわけでもなく,椎間板を変形させるような影響を与えるわけでもない。
実行者はこの処置において,脚の骨を傾斜させて,その関係を変えることになる。足関節と股関節において骨の関係を変えることになる。しかし,これらの関節では,特定の骨傾斜であれば,骨の関係は最大面積荷重の関係が維持される。なぜなら,足関節と股関節は,蝶番関節,球関節という関節構造の特徴により,最大面積荷重の関係となる領域が広いからである。股関節では,多少の屈曲であれば最大面積荷重の関係は維持される。
実行者が骨盤を含む上半身を骨傾斜の状態にすることは,筋や靭帯,椎間板への負担を通じて,腰痛や首のこり,呼吸活動の制約などを生じさせ得る。それは,問題となりやすい負担を与える処置といえる。これに対して,実行者が脚の骨を傾斜させる対処の仕方は,問題となるような負担を体に与えない。私達は,動作時の重心変位に対処するために,体のどこかの骨を傾斜させて重心位置を適切に位置づけることで,筋緊張を軽減させることができる。そして,私達が傾斜させるべき部位は,脚であるべきである。実行者が,脚の関節である足関節や股関節,そして必要であれば膝関節を用いて,上半身への負担を最小限のものにするという対処が,相対的に有利なものとなるといえる。
腕の動作中は重心が変位し続ける状態となるため,実行者は脚を用いた重心変位への対処を随時に,柔軟に行う方がよい。実行者は脚の関節をある特定の関係で固定化するのではなく,柔軟に対応できるようにしておくとよい。
腕の動作をここでは例として挙げた。頭や脚,胴体の動作など,動作には様々な姿勢変化が伴うが,その重心変位への対処として一定の割合の人が陥りやすいパターンは,腕の動作で挙げたことと同じ対処である。実行者が骨盤後傾に加えて脊柱も骨傾斜の状態とし,重心を後方に乖離させて,その力のモーメントを筋で支えるという対処の仕方である。結果的に,実行者は腹筋群や首の筋群などの筋緊張を強くすることになる。有利な対処とは,実行者が脚を用いて骨盤を立骨状態とし,重心を支持基底面上の適切位置に位置づけ続けることである。骨盤が後傾すれば,脊柱の立骨状態は実現されにくいことから,有利な動作を目指す人は,動作の様々な姿勢変化において,特に骨盤を後傾させないようにすべきである。
前章では,体の制動を有利なものにするために,実行者が支持部位接面部で支持面に最大面積荷重をかけていくようにすることを述べた。動作時は姿勢変化によって重心変位が起こり,重心が支持基底面上の適切位置から乖離しやすいが,乖離させてしまえば支持部位における最大面積荷重が損なわれて制動も有利なものにならなくなる。実行者が動作時に重心乖離を容認しないことは,制動にとっても有利になることである。実行者が姿勢変化による重心変位への対処を,無思慮に行ってしまえば,体の負担を生むだけでなく,その動作も不利なものにすることになる。
コメント