3. 腕や脚の動作
固有制動先を考慮する
有利意図の人は,動作の際に重鎮基底制動と目的端先導を意図して実行するだけでも,多くの行為を腹筋群と首の筋群を過剰に筋緊張させずに行うことができ,一定の効果を得られるだろう。より大きな力やスピードの発揮が求められる場合は,これらに加えて意図した方がよいことがある。それは「特にどの部位を抑止するのか」という,その動作における固有の制動先にあたる部位を抑止する意図である。
骨傾斜容認の人は,大きな力を発揮したり,速い速度で動作する場合には,制動のための筋収縮力の強さから制動すべき部位を動かしてしまいやすい。有利意図の人は,動かしやすい特定の部位を積極的に抑止することで,有利な体位状態を維持することができ,有利な動作を導くことができるようになる。
重鎮基底制動は,「制動元」にあたる支持部位の抑止と共に,体を支える骨を制動していく方法であり,有利意図の人が全ての体の動作で採用するべきものである。体の動作といっても,腕や脚を動かす,頭を動かす,声を出すなど様々なものがある。有利意図の人は,このそれぞれにおいて「制動元」の支持部位への意図だけでなく,「特にどの部位を抑止すれば最も効果的になるか」という「固有制動先」の意図も加えるのである。実行者がこの固有制動先の意図を加えることで,大きな力の発揮や速い速度が求められる行為においても,力の発揮の効率を落とさずに行えるようになると考えている。これはつまり,実行者は最小限の筋緊張で力を発揮できるようになるということであり,また実行者の持つ最大限の力を発揮できるようになるということである。
実行者が固有制動先を意図する際に自身に出す指示は,腕や脚の動作,呼吸や発声の活動によってそれぞれ異なる。この章では腕や脚,体節の動作時における指示の仕方について述べ,呼吸や発声における指示の仕方については第8章で述べる。
腕を動かす際に持つ意図
腕の動きにおける固有制動先は「胸骨上端部」と「頭」になる。以下に,その理由を述べ,実行者がこの制動を実現するための具体的な指示の仕方を述べる。
腕は上肢とも呼ぶが,胸の上部にある鎖骨も上肢の一部であり,実行者が腕を動かす際は鎖骨も連動して動く。その鎖骨が,胸鎖関節で体軸骨格である胸骨と関節する。このため,実行者は腕の動きの際に胸骨を動かしてしまいやすい。しかし,腕の動きの際に実行者が胸骨を動かしてしまえば,それと共に鎖骨の近位端を動かすことになり,上肢の骨の相対的関係を崩してしまいやすい。肩甲骨と鎖骨と胸骨を骨傾斜の状態としてしまい,実行者は脇や肩甲骨周りの筋群を過剰に筋緊張させることになる。実行者は,腕の動きを有利なものにできなくなる。
また,実行者がこの胸骨を腹筋群の牽引などで下方に動かしてしまっても同じ結果となる。実行者は骨傾斜容認で過剰共縮制動をすると胸郭前傾を起こしやすいが,胸骨は胸郭の一部を成しているため,実行者は胸郭前傾時に胸骨を同時に下方に動かしてしまうことになる。
実行者はこの胸骨の動きを抑止することで,腕の動きにおける力の発揮を効率的なものにできるようになる。鎖骨と関節する部位が胸骨の上端部であり,有利意図の人は胸骨上端部を固有制動先として制動した上で腕を動かすのである。
固有制動先となる胸骨上端部の制動を実行者が実現する際には,実行者は「胸骨上端部から先導端部位を動かす力を伝える」と意図するとよい。固有制動先を「力の伝達の中継箇所」と意図するのである。
この「胸骨上端部から力を伝える」という抽象的イメージによる意図が適当となる理由を述べる。本来の目的からすれば「胸骨上端部を止めて腕を動かす」という意図が適当なものとなるだろう。しかし,この意図を実行者が持つ場合は,実行者の注意が「胸骨上端部を止めること」に向かいやすく,実行者の元々の動作目的である「腕を動かす」「腕で力を発揮する」ことに注意が向かいにくくなる。
固有制動先の意図は付加的なものであり,実行者がより優先すべきは重鎮基底制動と目的端先導の意図である。支持部位の抑止と動きの先導端の結びつきの強さの方を優先すべきと考えている。こうした理由から,実行者が「支持部位が止まっていて,固有制動先を止めて,動作を起こして力を発揮する」と意図するよりも,「支持部位が止まっていて,固有制動先から動作の先導端を導く力を伝える」と意図する方がよりよいものとなる。実行者は,支持部位と腕の動きの意識上のつながりを維持する中で,それを分断することなく固有制動先への注意を含むことができる。実行者は「有利な動作のための力の流れ」をイメージすることができ,そのイメージで固有制動先の抑止を実現できるようになる。
また,実行者が「胸骨上端部から力を伝える」とする意図を持つことで,実行者は体の前側の胸骨上端部に注意を向けることができ,肩甲骨と鎖骨,胸骨における骨の立骨状態を維持しやすくなる。
実行者が腕を動かす際には,動かす骨に反力を返す必要があるが,実行者は動かす骨に隣接する骨をより近位の骨に押し付けるようにしてその反力を形成する。上腕骨を肩甲骨に押し付け,肩甲骨を鎖骨に押し付ける形である。この結果,胸骨には鎖骨から押し付けられる力が働くことになる。胸骨は上肢の骨の反力形成の起原の骨ともいえる。このため,実行者が「胸骨上端部から力を伝える」と意図することによって,上肢の骨の反力形成のルートを適切に意識できるようになり,上肢の骨の立骨状態を維持しやすくなる。
これは腕の立骨制御となるため,実行者がこの意図で制御することによって,腕の過剰共縮制動となる首や肩甲骨周りの筋緊張を過剰にするパターンからも脱しやすくなる。腕の過剰共縮制動を行っている人の場合は,肩甲骨周りの筋緊張が強くなることから「首の背側部や肩甲骨周りから力を発揮している」という動作意図を無自覚に持ちやすい。この無自覚な動作意図では,肩甲骨周りの筋群を強く筋緊張させてしまい,鎖骨の遠位端を背側の方に動かしてしまって,肩甲骨と鎖骨,胸骨の骨の立骨状態を崩してしまうことになりやすい。実行者が「前側から力を伝える」という意図を持つことで,こうした不利なパターンを抑制しやすくなる。
実行者がこの「胸骨上端部から力を伝える」意図を持ち,腕の立骨状態で腕を動かした際には,鎖骨が胸骨を押し,胸骨が鎖骨を押し返すことで生じる圧力の感覚を,実行者は胸骨上端部から実際に得ることができる。希薄な感覚ではあるが,訓練することで適切な圧力感覚が生じていることを特定できるようになる。
これらが,実行者が固有制動先を「力の伝達の中継箇所」と考え「胸骨上端部から力を伝える」意図を持つことが適当なものとなる理由である。
腕の過剰共縮制動の傾向を持つ人が「前側から力を伝える」ように言われると,その真逆な感覚的な違いから,はじめは腕を動かせないように感じるかもしれない。しかし,実行者が動かすことは可能であるし,何度も意図して実現していればその感覚に慣れていくことになる。
有利意図の人は「前側から力を伝える」という意図を,重鎮基底制動と共に積極的に持つようにする。腕の支え方でも述べたことだが,腕の動きや支持の際により多く使われる筋は,肩甲骨周りの筋群であり,それらは背側にある。このため,実行者はそこに疲労を感じることもあって「首の背側や肩甲骨周りに力を入れて腕を動かす」という無自覚な動作意図を持ちやすい。是正を考える人は,気づいた際に「前側から力を伝える」という意図を積極的に持ち,かつ気づく頻度を多くして繰り返し意図する方がよい。
有利意図の人は,腕の動きの際に,頭ももう一つの固有制動先と考えるべきである。腕の動きによって頭にも動かされる力が働く中で,頭の制動は脊柱安定化に貢献し,それによって胸骨安定化に貢献するである。
腕の支え方でも述べたように,上肢は頭から筋で吊り下げられている。僧帽筋や肩甲挙筋は,肩甲骨と頭頸部に付着し,上肢の一部である肩甲骨を支えたり,肩甲骨を動かす役割も担う。実行者が腕を動かす際には,これらの筋を働かせることから,頭蓋骨と頸椎を下方に牽引することになる。この牽引は,頭蓋骨を後方に回転させるような頸椎伸展をもたらすものである。
また,実行者が大きな力を発揮したり,速い速度の動きをする際は,腹筋群と首の筋群にそれなりの強さの筋緊張を生じさせることになる。発揮する力が強ければ強いほど,体軸部の制動力も強さが必要となるためである。腹筋群の筋緊張は,実行者の肋骨を下方に牽引する。実行者が骨傾斜容認でいて背筋群を適切に働かせていなければ,この牽引によって肋骨を下方に動かしてしまい,胸郭前傾を起こしてしまう。この胸郭前傾は脊柱屈曲によるものであり,実行者は同時に頭頸部を前方に動かすことになる。また,実行者は首の筋である胸鎖乳突筋,頭最長筋,頭半棘筋も強く筋緊張させることになる。これらの筋群の筋緊張は,その付着部である頭蓋骨背側部を前下方に牽引する。実行者が骨傾斜容認でいれば,頭蓋骨を後方に回転させるような頸椎伸展を起こすことになる。
このように,腕を動かす際には実行者には頭部前方突出と頸椎伸展をもたらす力が働くことになる。これによって実行者が頭を動かしてしまえば,脊柱を動かしてしまうこととなり,動かすべきでない胸骨上端部も動かしてしまうことになる。また,肩甲骨を支える筋も含めて筋群の筋緊張を全体的に強くすることになり,効率的な動作とはならなくなる。
これが意味することは,実行者が逆に頭を適切に制動できれば脊柱屈曲を防ぐことができ,筋緊張も最小限の程度に抑制できるということである。このため,有利意図の人は頭を腕の動きの際のもう一つの固有制動先とするのである。
有利意図の人が持つべき頭部制御の具体的な指示は「頭を最高位置に位置づけながら,頭の額を適度に前方に向ける」ことである。これは立骨重心制御の指示と同じである。実行者はこの意図を持つことで,立骨状態を維持する意図を強くすることになり,動作時に生じる牽引に拮抗できるようになる。実行者は「頭を最高位置に位置づける」ことで,脊柱起立筋の働きを促し,頭に生じる前下方の牽引に拮抗することができる。また,「額を適度に前方に向ける」ことで,頭長筋や頸長筋の働きを促し,頸椎伸展の動きである頭蓋骨の後方への回転に拮抗することができる。実行者は立骨制御状態であれば骨の立骨状態のメリットを活かすことができ,これらの筋群を最小限の筋緊張で拮抗させることができる。このように頭を抑止することで,不利な反応パターンを抑止することができる。頸椎伸展も起こさずに済み,頸椎への負担も抑えられる。
頭を固有制動先とすることから,有利意図の人は大きな力の発揮や速い速度の動きの際には,胸骨上端部と同様に「頭の額から力を伝える」と意図し,額を力の伝達の中継箇所とするように考えるとよい。
こうしたことから,有利意図の人は腕で大きな力の発揮や速い速度の動きをする際には,重鎮基底制動と目的端先導を意図した上で,「頭を最高位置に位置づけて,額を適度に前方に向けながら,胸骨上端部と額から力を伝える」と意図するとよい。
脚を動かす際に持つ意図
脚の動きにおける固有制動先は「腹部前面(へそ周辺)」と「頭」となる。
脚の動作において頭を固有制動先とする理由については,腕の動作におけるその理由と同じである。脚の動きでもより大きな力が求められる際には,腹筋群と首の筋群の筋緊張によって頭が下方に牽引されることになるが,実行者が頭を制動していくことは,これを抑止するための制御となる。もう一つの「腹部前面」を固有制動先とする理由は,腕の動作における胸骨上端部を固有制動先とする理由とは異なる。
腕ではその起点である胸骨上端部を固有制動先とした。脚の起点にあたる部分は股関節のある骨盤の寛骨臼に相当するように思われる。腕と同じ考え方を適用すると,実行者は骨盤の寛骨臼または骨盤を制動先として動くべきとなるが,これは適切なものとはならない。脚を動かす際は骨盤も脚と連動して動かすことになるからである。腕の動きの際には胸骨上端部は動くべきではない部位となるが,脚の動きの際には骨盤は脚と連動して動くべき部位となる。脚の動きでいう骨盤の位置づけは,腕の動きでいう鎖骨にあたるようなものである。実行者が連動して動くべきものを制動先とするのは,不適当な処置である。
脚の動きの際に骨盤が連動して動くべき理由を述べる。実行者が脚を動かす際は,片足立ちになったり中腰になったりと,その支持部位が変化したり,体全体の重心変位が大きくなる。骨盤の位置や向きは体全体の重量バランス調整に大きく影響を与える要素となり,実行者は脚の動作時に起こる支持部位の変化や重心変位に対応するために,脚の動きに合わせて骨盤も動かすことになる。この脚と骨盤の関係は,腕と胸骨の関係とは異なる。実行者が腕を動かすことで体の重心は多少変わるが,重心を調整する直接的な役割を胸骨が担っているわけではない。腕や胸骨は体位維持を直接的には担ってはいないが,脚や骨盤は体位維持を直接的に担っているのである。
脚の動きにおける固有制動先は,脚の動きで重量バランスが変わった際に動かされやすい部位であり,かつ体全体が安定するために止まっているのが望ましい部位である。これは体の重心部となる。体の重心部が安定すれば,他も安定しやすい。また,他の部位を安定させたとしても,体の重心部が安定しなければ,全体としては安定しにくい。脚の動きにおいては支持部位と重心の関係の変化が大きいため,実行者にとっては体の重心部を最も安定化させることが優先すべき制御となるのである。
体の重心部は,個人差はあるが腹部のへそ辺りの高さにある。実行者は「腹部前面のへそ辺り」を固有制動先とし,力の伝達の中継部位として脚を動かすことで,体全体にぶれが少なくなり,体の筋緊張を最小限のものに留めることができるなど,有利な動作を導けるようになると考えている。実行者はこれによって「力がのる」感覚を得ることができるだろう。
実際の体の重心部は,静止立位時においては前面ではなく腹腔内に位置している。しかし,実行者が重心部を制動するにあたっては,腹腔内ではなく腹部前面を意識していくとよいと考えている。腹部前面と考える理由は,実行者が脚を動かした際に,脚は体の前方に位置づけられるが,その際の体全体の重心部はより腹部前面に近い辺りに位置づけられるからである。実行者が脚を動かした後の体の重心位置は腹部前面に近づくため,実行者が始めから腹部前面を安定化させるような意図を持つことが適当なものとなるという考えである。
腹部前面を制動するために実行者が自身に出す指示の仕方としては,「頭を最高位置に位置づけて,額を適度に前方に向けながら,腹部前面と頭の額から脚や足に力を伝える」というものとなる。
有利意図の人が腕や脚の動作で力を発揮していく際に注意を向けるポイントを図7−1に示している。
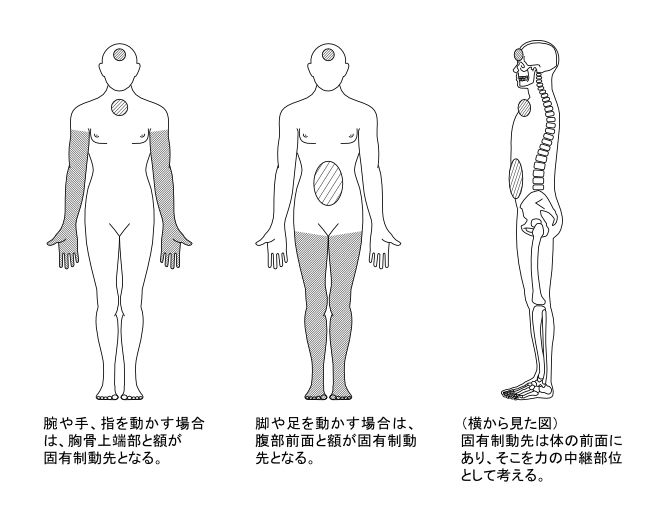
図7ー1 腕と脚の動作の固有制動先
- 立骨重心制御を実現する。頭を最高位置に位置づけて額を適度に前方に向け,骨盤を立てる。体重心を支持基底面上の適切位置に位置づけるために,支持部位の接面部全体に体重がかかるようにする。これを動作中も継続させる。
- 支持部位に体重を預け,支持部位が止まっていることを考えて,目的動作を導く先導端部位を動かすと意図する。
- 腕や脚の動作で大きな力を発揮したり,速い速度で動く際には,下記の体の前面部位から「力を伝える」意識を持つ。
【腕や手,指を動かす場合】頭を最高位置に位置づけて,額を適度に前方に向けながら,胸骨上端部と額から腕や手,指の先導端部位に力を伝える。
【脚,足を動かす場合】頭を最高位置に位置づけて,額を適度に前方に向けながら,腹部前面(へそ周辺)と額から脚や足の先導端部位に力を伝える。
- 前面の部位から動かす部位に「直線で力を伝える」イメージでよい。「腕や脚を通って力を伝える」とは考えなくてよい。
- 大きな力の発揮や速いスピードが求められる際には,重鎮基底制動を補助するために,立てた体を支える骨を通じて支持部位接面部を支持面に押し付けるようにイメージするとよい。また,頭部制御で額の向きをやや下に向けると頸椎の立骨状態を維持しやすく,安定しやすい。これは,顎を引く方向に額をやや下に向けることである。力を発揮する対象が下方にあれば,その方向に適度に額を向けていくのもよい。
- 脚を動かす場合は,腹部前面から「動かす部位に力を伝える」意識であり,腹筋群に筋緊張を入れるものではない。むしろ「できるだけ腹筋群には筋緊張を生じさせない」ように考えるべきものである。腹筋群には一定程度の筋緊張は入るだろうが,「勝手に筋緊張が入る」ように考慮する。
コメント